Clear Sky Science · zh
用于枣椰树授粉的 AI 驱动无人机
帮助枣椰开花的机器人
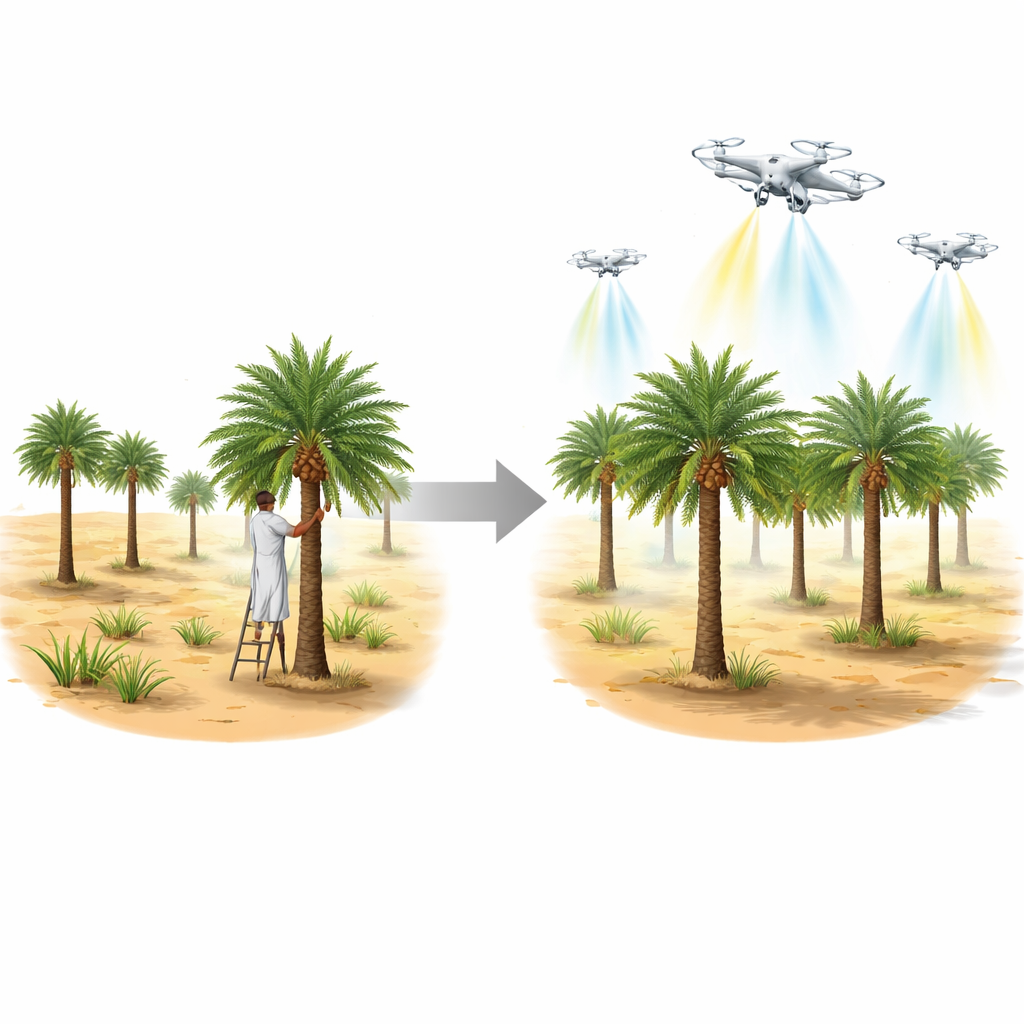
枣椰树对许多干旱地区至关重要,提供食物、收入和文化传承。然而让每棵树结果仍然依赖一项繁琐的工作:工人必须攀爬高高的树干,手工将花粉撒到花朵上。本文探讨了由人工智能引导的小型飞行机器人如何接手大部分工作,使授粉对农户来说更快、更廉价、也更可持续。
为何给这些树授粉如此困难
枣椰树生长在炎热且常常严酷的环境中,且可以长得像多层建筑那样高。雄花与雌花分布在不同的树上,因此花粉必须被有意地传递。传统方法——将雄花串绑入雌花簇或吹散干粉状花粉——需要熟练劳动力、谨慎的时机把握和大量花粉。随着农场规模扩大和熟练工人短缺,这些方法越来越难以应付,尤其是花期分散在数周内,需要对同一棵树多次造访。气候变化和天然授粉者的减少只会加剧这种压力。
无人机进入果园
小型飞行器和智能摄像头的最新进展开启了一种新方法:无人机辅助授粉。研究人员在本研究中设计并建模了一套无人机系统,能够定位枣椰的开花部位并以细雾形式喷洒花粉溶液。他们考察了两种模式。在半自主模式下,人工操作员负责起飞并将无人机引至每棵树附近,而机载软件负责识别花朵并控制喷洒。在全自主模式下,无人机按预设航线飞行,自检电池和传感器、避障、检测花朵、校准位置、喷洒并返回基站,几乎不需要人工干预。两种方法都旨在用数分钟的受控飞行取代数小时的攀爬工作。
教无人机识别花朵
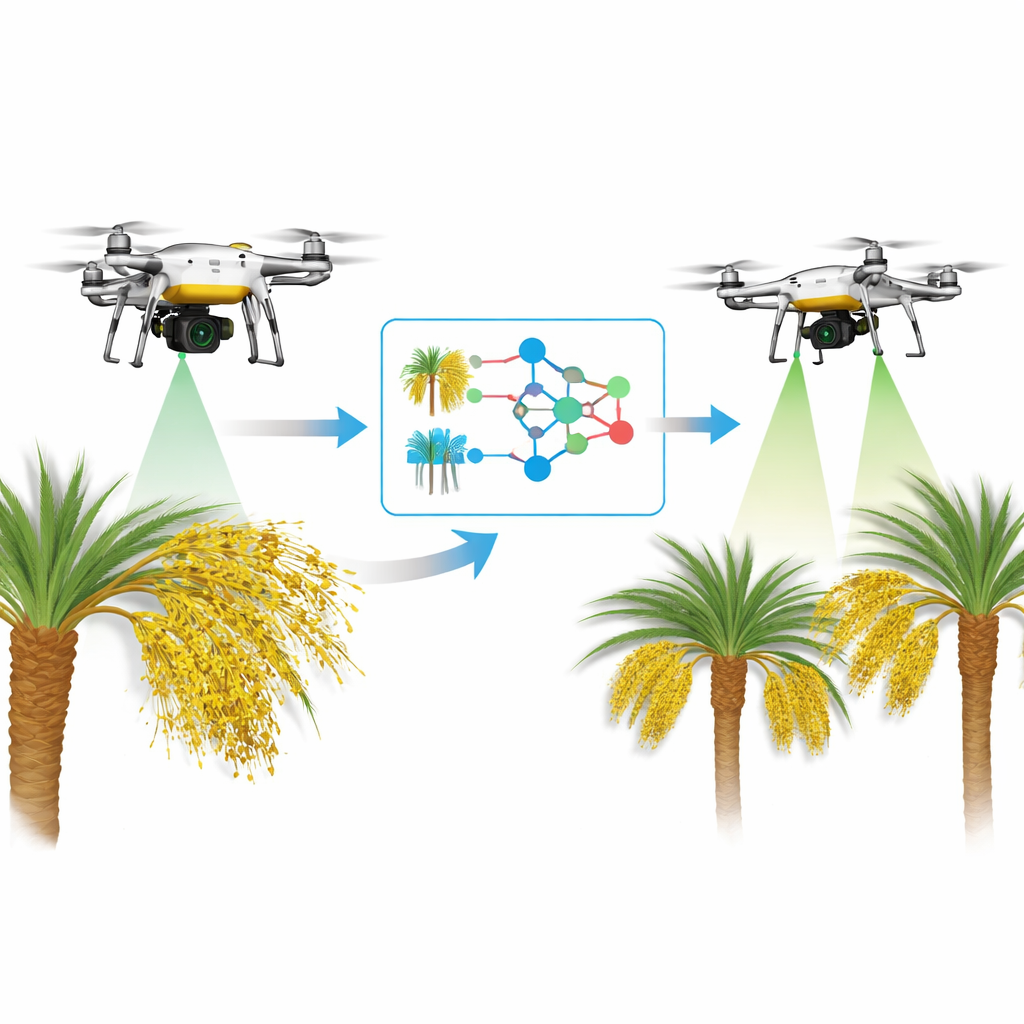
要实现这一点,无人机必须“看清”花簇以确定何时何地授粉。研究人员建立了一个大型图像数据集,涵盖不同光照、拍摄角度和生长阶段下的棕榈冠。专家在图像上为花簇标注了边框,以便计算机视觉程序学习识别。团队在该数据集上训练了现代的“你只看一次”(YOLO)模型——一种能实时检测物体的快速深度学习系统。他们尝试了多个版本及相关模型,并将表现最好的模型压缩与优化,使其能高效运行在安装于无人机上的小型低功耗计算板上。经过精调后,系统能以每秒十余帧的速度分析视频帧,同时保持足够高的检测准确率以指导精确喷洒。
设计飞行帮手
除了视觉系统,作者们还为果园工作设计了一款四旋翼平台。他们计算了电机和桨叶需要产生的推力以安全托举机架、电池和一升花粉溶液,以及无人机在充电前能在空中停留多久。以典型电池为例,测试平台每次飞行可为约六棵树授粉,每棵树对齐并喷洒全部主要花簇大约需一分钟。研究还比较了不同的无人机布局——四、六或八旋翼——强调了机动性、有效载荷、可靠性与成本之间的权衡。对于大型农场,作者表明并行使用多架无人机可以将为一千棵树授粉所需的总时间,从单机需要的数小时缩短到小型机群仅需数小时。
节省劳力、花粉与环境成本
该系统的一个关键优势在于如何使用花粉。无人机不是制造厚厚的粉尘云来覆盖整棵树,而是将稀释的液态花粉悬浮液直接喷到需要的位置。根据作者的计算并与现有商业系统比较,他们的设计每棵树可将花粉用量减少约97%,同时仍能达到相似的效果。与此同时,他们估算劳动力需求下降约80%,因为一个操作员加上少量无人机即可替代更多的攀爬工人。该平台也可改装用于精确投放肥料或农药,从而减少化学品浪费与径流。
这对农户意味着什么
这项工作尚未证明农户会因此获得多少额外产量,因为研究侧重于工程性能而非长期收成数据。不过,结果显示 AI 引导的无人机能够可靠地找到枣椰花、用温和喷雾触及花朵,并在大幅减少劳力与花粉用量的前提下完成任务。简而言之,该原型表明未来的农场可能依赖小型智能飞行机群来承担这一季节性高强度工作,让人们摆脱高风险攀爬,同时有助于在世界一些最干旱地区保障稳定收成。
引用: AlRaeesi, I., El-Khazali, R. AI-enabled drones for date palm pollination. Sci Rep 16, 10158 (2026). https://doi.org/10.1038/s41598-026-39739-2
关键词: 无人机授粉, 枣椰种植, 精准农业, 农业机器人, 计算机视觉