Clear Sky Science · zh
用于积分加死区系统的改进史密斯预测器和自动消除偏差控制器中的测量噪声衰减
这对日常技术为何重要
我们依赖的许多设备——从化工厂与电力系统到汽车和小型实验装置——都必须对延迟且被噪声污染的传感器读数作出反应。本文提出了一个简单但关键的问题:当信号既延迟又嘈杂时,哪种自动控制器能保持系统稳定、准确,并对设备更温和?作者将一种流行的基于预测的方法与一种较新的主动估算并抵消扰动的方法进行比较,揭示了为什么在现实世界的混乱条件下后者更可靠。
延迟反应与不稳的传感器读数
在许多过程里,改变输入(如加热器功率或阀门位置)不会立即影响输出。存在一个内在延迟,热量扩散、化学混合或机械部件移动都需要时间。工程师通常把这类系统描述为“积分加死区”(integrator plus dead time):输出会累积输入的影响,但只有在等待一段时间后才会显现。与此同时,用于测量温度、流量或位置的传感器总带有一些随机噪声。因此,控制器必须控制一个既有延迟又通过抖动镜头被观察到的系统。如果处理不当,控制信号可能剧烈摆动,致使执行器磨损,且仍无法达到期望的目标值。
传统预测器与新的偏差消除器
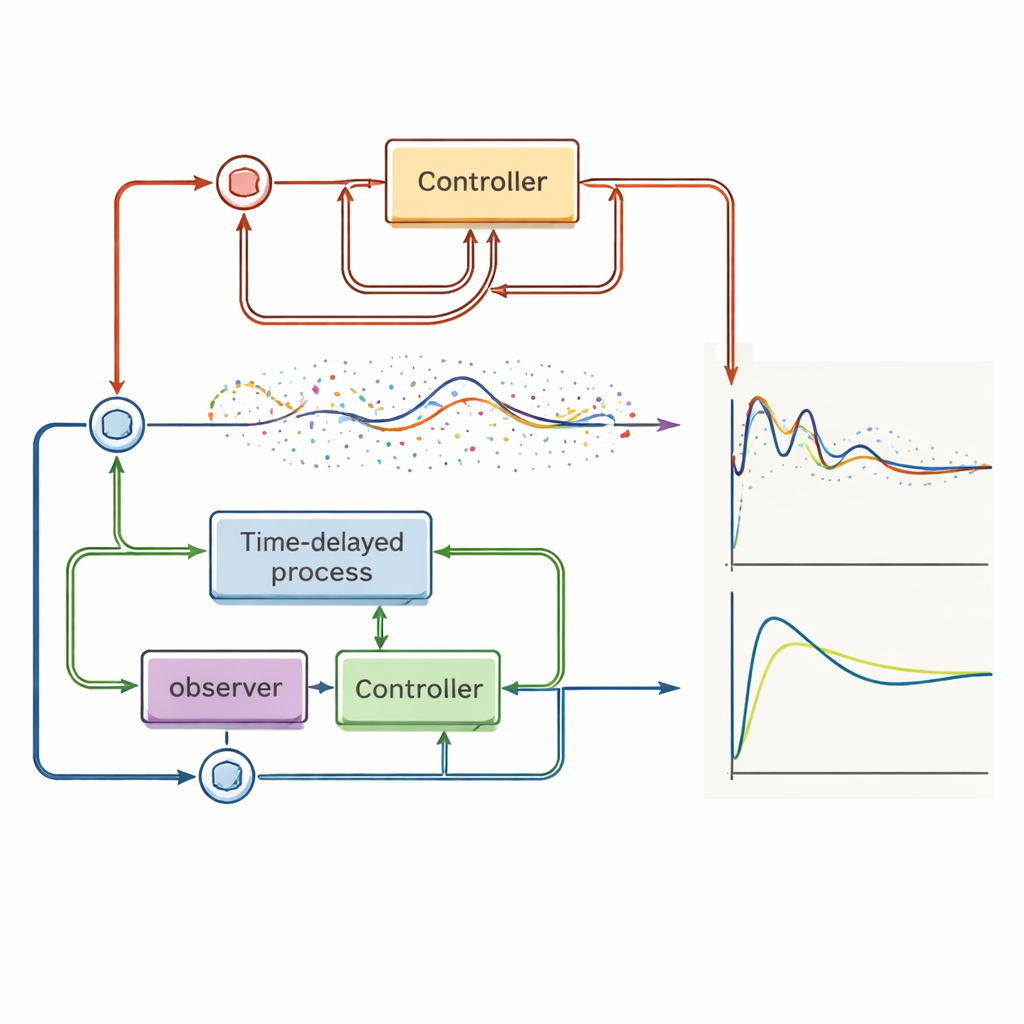
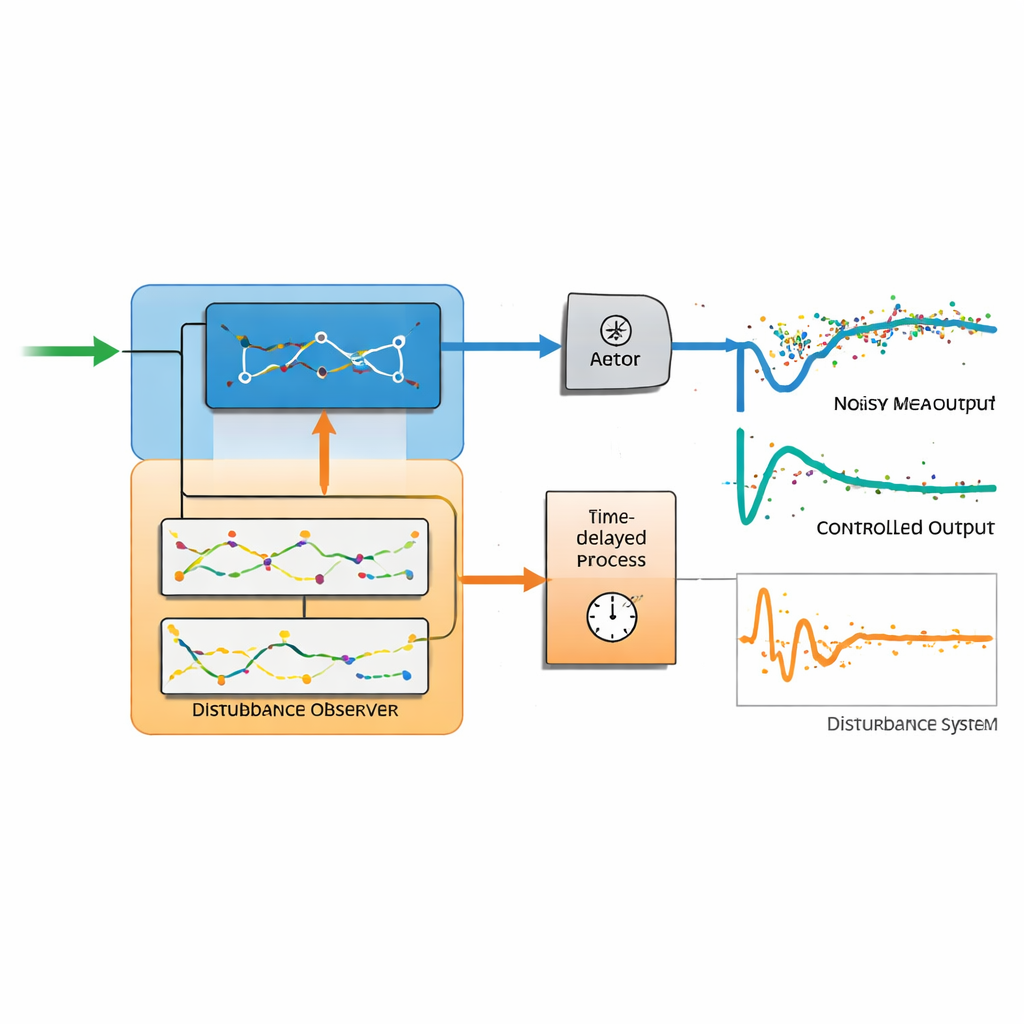
经典的史密斯预测器及其现代变体(Åström–Smith 预测器)通过建立过程的内部模型并用其预测未来输出来处理时滞。在理想条件下,这可以带来快速而灵敏的响应。本文对比的另一种设计称为自动消除偏差控制器(automatic offset controller),路径不同。它将普通的稳定化控制器与扰动观测器结合——该模块推断施加在输入端的隐含扰动并自动抵消。关键在于,该观测器采用了对延迟系统的完整内部模型,配以精心设计的低通滤波器,并在需要时使用输出的高阶导数。这一结构允许工程师调节扰动重构的速度,而不干涉系统跟踪设定值的能力。
当噪声是真实而非理想化时会发生什么
当作者在仿真和实验中加入真实的测量噪声时,两种方法之间的差异变得明显。基于预测的控制器依赖若干边界稳定的积分环节,对噪声极其敏感。即使噪声水平仅约为信号的百分之一,控制努力也会爆发性增长——比自动消除偏差控制器大数百到数千倍——执行器信号变得剧烈抖动。更糟的是,预测器不再能保证输出最终达到设定值:持续偏差甚至不稳定现象会出现,特别是在执行器饱和时。相比之下,自动消除偏差控制器在其滤波与扰动估计结构的帮助下,保持了平滑的控制信号,有效抵抗恒定扰动,并使输出接近目标值。
将方法付诸实际测试
论文并未止步于抽象模型。作者将两种控制器应用于一台用简单时滞主导模型近似的不稳定化学反应器,以及一套真实的热力学实验装置(由灯、温度传感器和冷却风扇组成)。在不稳定的案例中,自动消除偏差控制器仍能可靠工作,尽管需通过更保守的调参来避免超调;而基于预测的方法随着噪声加剧出现不断增长的误差。在热力装置上,自动消除偏差控制器产生了近时间最优的响应,在温度和控制努力上都保持平滑,即便风扇引入突变。相反,只要存在现实噪声与执行器限制,基于预测的控制器就表现出明显的稳态误差以及更慢、更不可靠的特性。
这对未来控制器的启示
从非专业角度看,结论很明确:仅仅依靠基于理想模型的预测控制器在理论上可能很诱人,但一旦出现真实世界的噪声与约束,表现可能严重失常。带有内置扰动观测器并对内部模型进行精心滤波的自动消除偏差控制器,证明在广泛的时滞过程下更稳健、更精确且更易于调参。作者总结道,虽然改进的史密斯预测器在低噪声的特定场景仍有用武之地,但基于扰动观测器的设计对于传感器不完美且稳定性至关重要的现代控制系统而言,是更简单、更可靠的默认选择。
引用: Huba, M., Bistak, P. & Vrancic, D. Measurement noise attenuation in modified Smith predictor and automatic offset controllers for integrator plus dead-time system. Sci Rep 16, 8335 (2026). https://doi.org/10.1038/s41598-026-39732-9
关键词: 时滞控制, 扰动观测器, 测量噪声, 自动消除偏差控制器, 史密斯预测器