Clear Sky Science · zh
基于随机决策森林方法的无人机操作员瞌睡检测研究
为什么让无人机驾驶员保持清醒很重要
随着无人机承担越来越多的任务——从检查输电线路到支援救援行动——那些在地面操控它们的人必须保持高度专注。然而,长时间任务、重复性的屏幕监视和夜班会悄然将操作员推向困倦,增加代价高昂甚至致命失误的风险。本文探讨了一种基于摄像头的系统,如何实时观察驾驶员的面部,并使用一种透明的机器学习方法判断某人是否已经过于困倦而不适合继续飞行。
识别困倦操作员的三种途径
作者首先概述了三大类瞌睡检测方法。一类关注飞行器的行为:车道内摆动、偏离航道或更多的控制错误。另一类监测来自身体和大脑的信号,如脑电、心率、呼吸或皮肤电导。这些方法可能准确,但通常需要佩戴传感器,可能不适合在实际控制室中使用。第三类观察外在行为:眨眼频率、眼睛闭合持续时间、打哈欠以及头部倾斜情况。由于摄像头可以在不接触操作员的情况下捕捉这些信息,行为检测方法对无人机控制中心尤其具有吸引力。
从面部读取疲劳信号
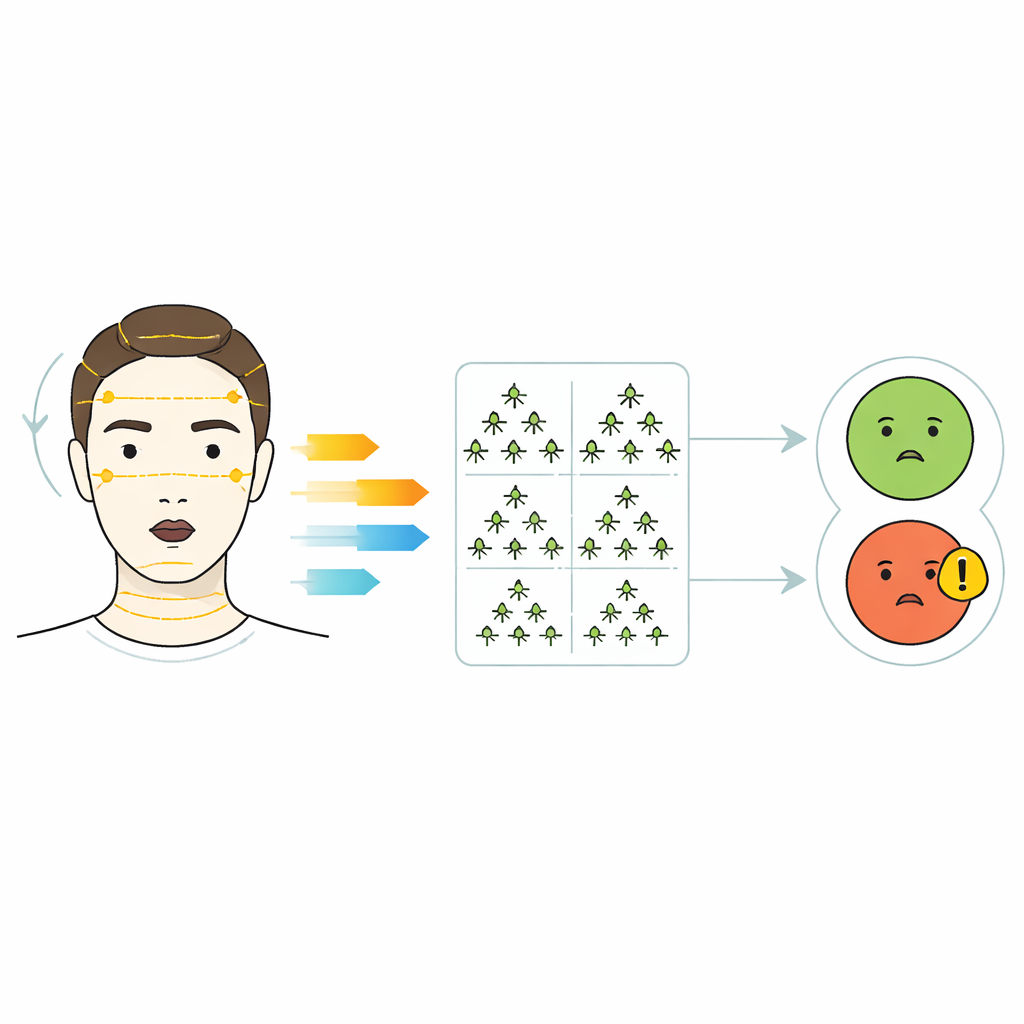
本研究开发的系统聚焦于若干与困倦相关的面部线索。计算机视觉库在实时视频流中跟踪操作者面部的三维点。从这些标志点,程序计算“眼部纵横比(eye aspect ratio)”以评估眼睛的睁开程度、一分钟内眼睛处于大部分时间闭合的比例(一个广为人知的度量称为PERCLOS)、嘴部张开程度以及头部向前、向后或侧向的倾斜幅度。该软件在消费级硬件上运行足够快,能够提供近实时反馈,并记录所有测量以便后续分析。
一个简单规则加上智能备选
为判断驾驶员是否困倦,作者将一条可信规则与一个更灵活的模型结合起来。PERCLOS在睡眠与安全研究中有强有力的支持,作为主要的判断门槛:极低值表明清醒,极高值表明困倦。当PERCLOS处于中间区间时,系统则转向随机森林分类器,综合考虑眼睛睁开度、嘴部张开和头部倾斜。随机森林由许多小决策树组成,每棵树对状态投票;它们的综合投票决定最终结果。系统还在短时间窗口内对判定进行平滑处理,以避免单帧异常触发不必要的警报。
看见模型“思考”的过程
不同于许多作为不透明“黑箱”的深度学习系统,随机森林可以被解析以揭示其决策依据。作者在一个广泛使用的驾驶瞌睡视频数据集上训练模型,并在保留的被试以及一个独立数据库上进行测试。性能稳健,系统更倾向于产生误报而非漏报真正困倦的操作员——在航空领域这是更安全的权衡。他们通过绘制当各特征变化时预测风险如何变化的图,展示例如非常小的眼睛睁开度会强烈推动模型得出困倦结论,而极端的头部倾斜只有在超过某一角度后才会引发怀疑。特征重要性分析也确认眼睛睁开程度主导了模型判断,嘴部张开和头部倾斜起辅助作用。
这对更安全的无人机飞行意味着什么
研究结论认为,一种可解释的面部监测系统——以经验证的眼睑闭合度量为核心并由随机森林支持——能够在不对操作员施加医疗传感器的情况下可靠地标记无人机操作员的困倦。同时,透明的模型揭示了训练数据中的偏差和空白,指导未来系统如何改进,例如增加更多样化的被试、照明条件以及来自无人机本身的额外信号。简而言之,这项工作为远程驾驶员的座舱式安全监控提供了一条既实用可部署又可审查的路径,帮助组织建立对监控其人员的技术的信任并予以改进。
引用: Wojtowicz, K., Wojciechowski, P. & Panasiewicz, A. Research on drowsiness detection in UAV operators based on the random decision forest method. Sci Rep 16, 9726 (2026). https://doi.org/10.1038/s41598-026-39195-y
关键词: 瞌睡检测, 无人机操作员, 面部监测, 随机森林, 飞行安全