Clear Sky Science · zh
基于插值滤波两步法的视频识别车辆轨迹数据重建策略
为什么清理数字交通数据至关重要
每当交通摄像头记录车辆通过路口的画面时,它都会产生一串隐藏的数据,描述每辆车的行驶路径、速度以及加减速情况。这类信息对于提升道路安全、优化信号灯以及支持未来的自动驾驶至关重要。但现实中这些数据往往很嘈杂:车辆会被卡车遮挡,雨天车灯眩光,计算机视觉系统也会出错。本研究处理的是一个非常实用的问题:如何将这些有缺陷的视频数据转化为可信的车辆运动记录?
当摄像头“误读”车辆运动时
基于视频的跟踪具有成本低、非入侵式并能覆盖大范围的优点。然而原始输出存在两类主要问题。第一类是明显错误,例如车辆看起来倒退、从高速瞬间停下或出现不可能的加速度突变。这类错误通常由遮挡、运动模糊或跟踪软件短暂丢失目标引起。第二类是随机抖动——报告位置上的小幅快速摆动。当由这些位置计算速度和加速度时,抖动会被放大,使正常驾驶看起来像是不稳定的驾驶。如果不加修正,这些问题会使交通模型出现超过40%的偏差,进而误导安全研究和自动驾驶系统。
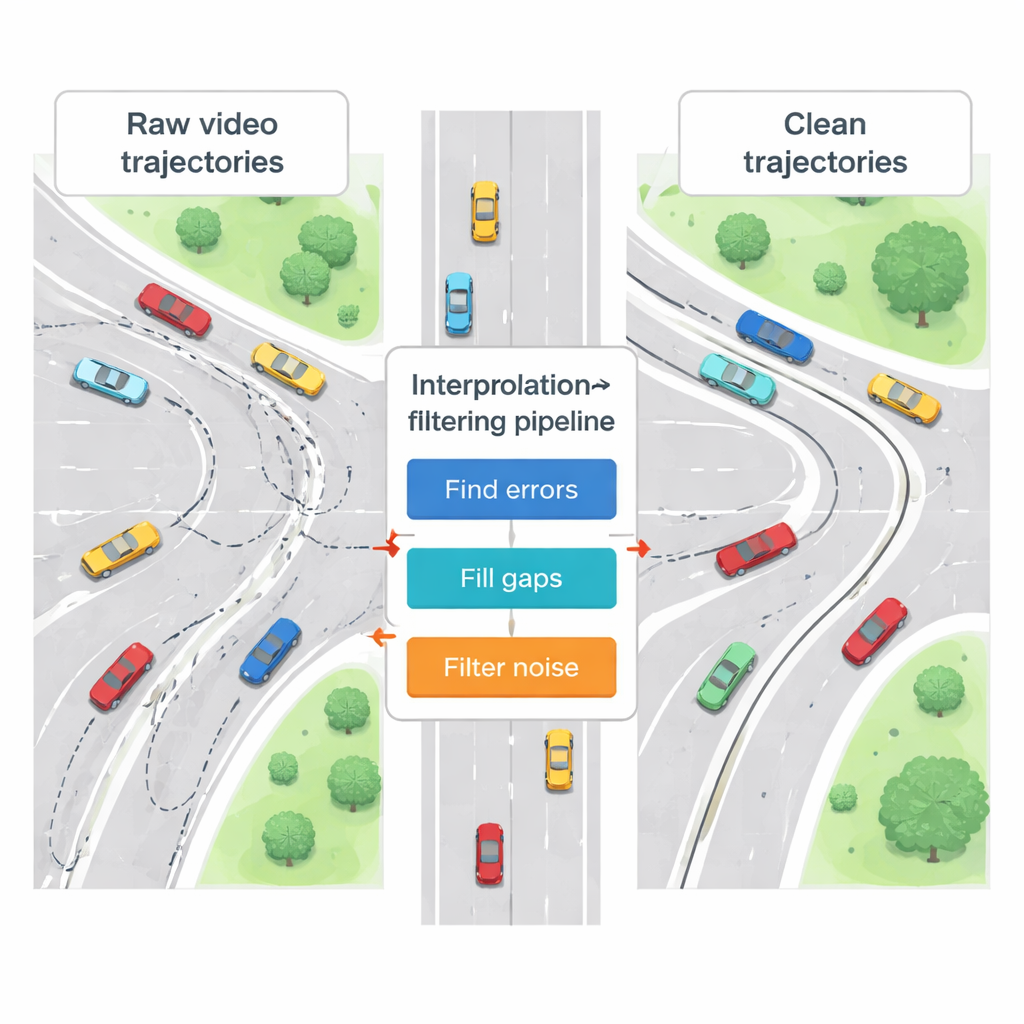
一个两步的清理方案
为修复这些问题,作者提出了一个像细心数字技师一样的两步重建策略。第一步聚焦于明显的错误:扫描每辆车的记录,查找违反简单物理限制的速度和加速度点,例如极高的跃变(加速度的骤变)或超出真实车辆与驾驶员能承受范围的加速。一旦检测到这些离群点,便用插值等数学工具将其替换,通过邻近更可靠的点来估算缺失值。研究比较了几种插值方法,发现称为Hermite插值的方法在运动复杂时比传统的Lagrange方法更能保留轨迹的自然形态。
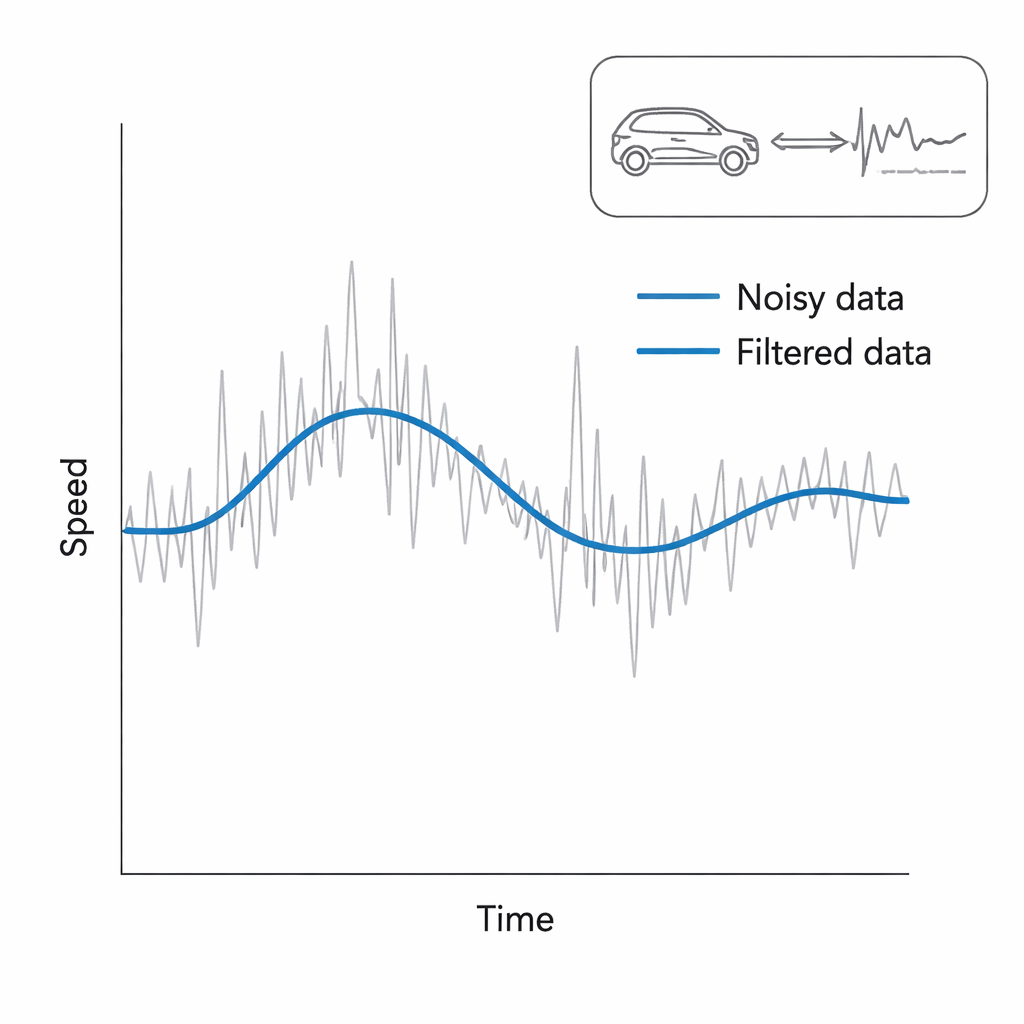
对数字行程进行平滑处理
第二步处理更微妙的噪声问题。即便粗大错误被修正,剩下的轨迹仍可能略显抖动。研究者在此测试了两种平滑方式:一种是改进的移动平均法,对较近的点赋予更高权重;另一种是统计算法卡尔曼滤波,它随着新测量到来不断更新对车辆真实位置和速度的最佳估计。这两种技术都能抑制抖动,但卡尔曼滤波在跟踪真实驾驶变化(例如轻微制动或并线)时表现更好,不会将这些真实变化模糊掉。结果是得到更平滑、更符合实际的车辆行为描述。
方法实测检验
团队将其框架应用于中国郑州一处繁忙市区路口的真实视频,使用现代目标检测与跟踪软件提取车辆轨迹。然后将数十条不同的车辆轨迹输入两步处理流程,并用简单的物理量表征成功与否:加速度波动程度以及跃变超过乘用车不现实水平的频率。他们还将清理后的基于视频的轨迹与直接从车辆仪表记录的真实数据进行比较。在多种驾驶情形下——匀速行驶、紧急制动、并线等——该插值加滤波的组合策略将加速度可变性约降低了85%,几乎消除了不合理的跃变尖峰,并且比若干对比方法更接近仪表记录的真实情况。
这对日常出行意味着什么
简单来说,本文展示了如何将普通交通摄像头拍摄的有缺陷视频转化为工程师和自动驾驶系统可以信任的数据。通过先修复明显故障,再谨慎地平滑噪声,所提方法能生成现实可信的车辆数字轨迹,而无需依赖昂贵的硬件或大量计算资源。更清晰的数据可用于优化信号灯配时、更准确的拥堵仿真以及依赖于真实驾驶行为理解的更安全自动驾驶算法。尽管该研究集中于一座城市,且尚未覆盖所有天气或路况,但它为利用现有视频网络作为下一代智能交通系统可靠传感器铺就了一条清晰、实用的路径。
引用: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
关键词: 车辆轨迹, 交通视频数据, 数据去噪, 智能交通, 自动驾驶