Clear Sky Science · zh
基于ESO的自适应神经网络四旋翼控制,以抵抗风扰动和载荷扰动
在复杂真实环境中保持无人机稳定
小型四旋翼无人机越来越多地用于桥梁检查、农作物监测或运送小型包裹等任务。但在真实环境中,这些飞行机器人会遇到阵风和悬挂在下方摆动的负载,这两类扰动都很容易把它们从预定航线上拽离。本文提出了一种新方法,可使此类无人机在空气湍流和摆动载荷牵引下仍沿规划路径平稳飞行。
为什么风和悬挂负载如此棘手
四旋翼无人机本质上难以控制。它质量轻、对小电机输入变化反应敏捷,且各方向运动高度耦合。当强风或快速变化的风扰作用于无人机时,会产生不可预测的推动力。再加上悬挂在缆绳下的载荷(例如相机或装有液体的瓶子),情况会进一步恶化:载荷会像摆钟一样摆动,把额外的力反馈给无人机。传统控制器——如广泛使用的PID方法,或更高级的滑模与反步控制方案——仅在工程师对无人机物理特性有非常精确认识且扰动较小时表现良好。如果数学模型不够精确,或风和载荷力以复杂方式变化,这些方法可能导致响应迟缓、超调或飞行中明显颤动。
用于隐性扰动的智能看门狗
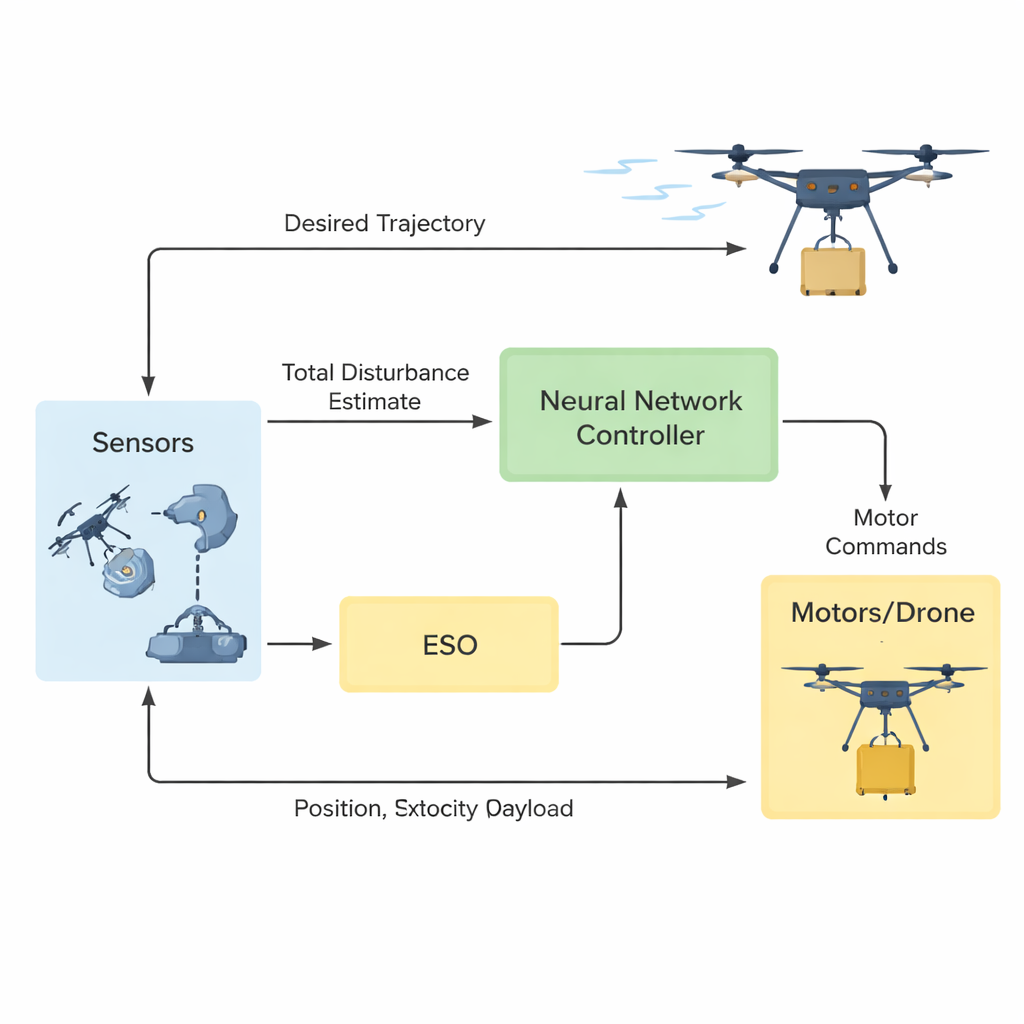
为了解决这一问题,作者基于一种称为主动扰动抑制的理念展开。与其尝试对风和摆动载荷的每一处细节建模,不如将所有未知影响合并视为单一的“聚合”扰动。一种专门设计的扩展状态观察器就像数学上的看门狗,不断从无人机的运动中推断出这个总体扰动。值得注意的是,他们的观察器只需一个主要参数来调节,这相比许多现有设计大大简化了设置。理论证明,适当调校时,观察器对扰动的估计会快速收敛且保持严格有界,意味着它可被用作实时前馈修正,而不仅仅是粗略的猜测。
让神经网络学习难以建模的部分
即便有了良好的扰动估计,控制器仍需了解电机命令如何转化为实际运动——这一关系取决于质量、几何以及可能随时间变化的其他物理细节。作者并未依赖繁琐识别出的模型,而是引入了径向基函数神经网络,直接从飞行信号中学习这种映射。控制器只需要知道无人机的位置、目标位置以及期望轨迹的二阶导数(目标点加速度变化)。一种自适应律不断更新神经网络的内部权重以减少跟踪误差。通过基于Lyapunov的分析,作者证明在这种自适应方案下跟踪误差保持一致有界且可任意减小,同时权重更新保持稳定。
方法的测试验证
团队通过计算机仿真和真实实验验证了他们的方法。在仿真中,无人机被要求在三维空间中跟随具有挑战性的螺旋路径,同时遭遇随机阵风和随时间变化的载荷力。新控制器与三种其他先进方法进行了比较:线性主动扰动抑制、滑模控制、无模型终端滑模控制,以及在更艰难的测试中,具自适应分数阶控制。跨越多种场景,所提方法取得了更平滑的轨迹和更小的均方根位置误差,尤其是在扰动出现后表现更优。在实体测试中,研究人员在室内飞行一台四旋翼,同时两台工业风扇向其吹风,下方悬挂一瓶200克的水。运动捕捉相机记录无人机位置。即便在持续风扰和对载荷的手工拉扯下,无人机仍将目标点保持在几厘米范围内,电机指令也保持良好,这表明该方法对实际硬件具有可行性。
这对日常无人机使用意味着什么
对非专业读者而言,关键结论是:该工作提供了一种方法,使无人机在恶劣条件下更可靠,而无需对其内部物理特性有完美了解。通过将一个简单但功能强大的扰动观察器与基于学习的控制器相结合,系统能够在飞行中自适应阵风和摆动负载,且调参工作量很小。这类鲁棒、模型轻量的控制方式有望简化无人机在城市、农场和工厂等场景的常规部署,类似的思想最终也可能推广到多机协作和容错设计,使无人机在部分组件故障时仍能安全飞行。
引用: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
关键词: 四旋翼控制, 无人机稳定性, 风扰动, 神经网络控制器, 载荷跟踪