Clear Sky Science · zh
PCA 白化提高了使用傅里叶特征的视觉定位对光照变化的耐受性
机器人在室内找到路径
想象一台机器人在家中或办公室穿行,一天阳光明媚,下一天灯光昏暗。为了知道自己在哪里,机器人将当前相机看到的画面与之前存储的图像进行比对。但当光照发生剧烈变化时,同一地点可能看起来几乎面目全非。本文探讨了一种精简且基于数学的方法,让机器人从全景图像中识别地点,并展示了一种名为 PCA 白化的统计技巧如何显著增强该方法对光照变化的耐受性。
将世界看作波而非像素
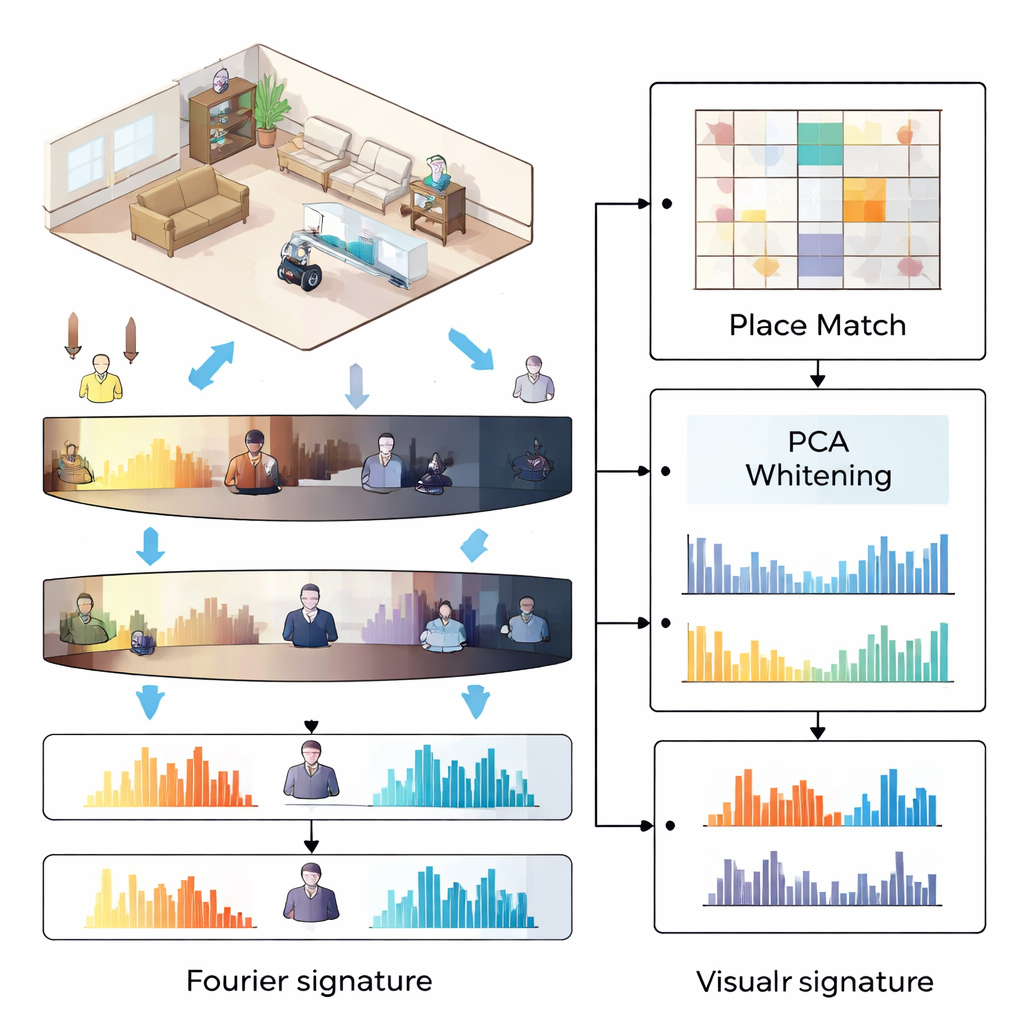
大多数现代视觉定位系统利用图像中的许多小细节——边缘、角点和纹理——并将它们合成为紧凑的“指纹”。相比之下,本工作基于傅里叶特征,将全景图像视为不同频率的波的混合,而不是像素网格。相机捕获的是 360 度视野;该全景被分成水平带,每一带被转换为一维频谱。只保留最低频率的幅值并将它们堆叠成描述子。因为该方法放弃了关于特征沿圆周出现位置的信息,当机器人仅仅转身时,描述子几乎不变,从而天然对旋转具有鲁棒性。
为何光照会破坏简单的特征
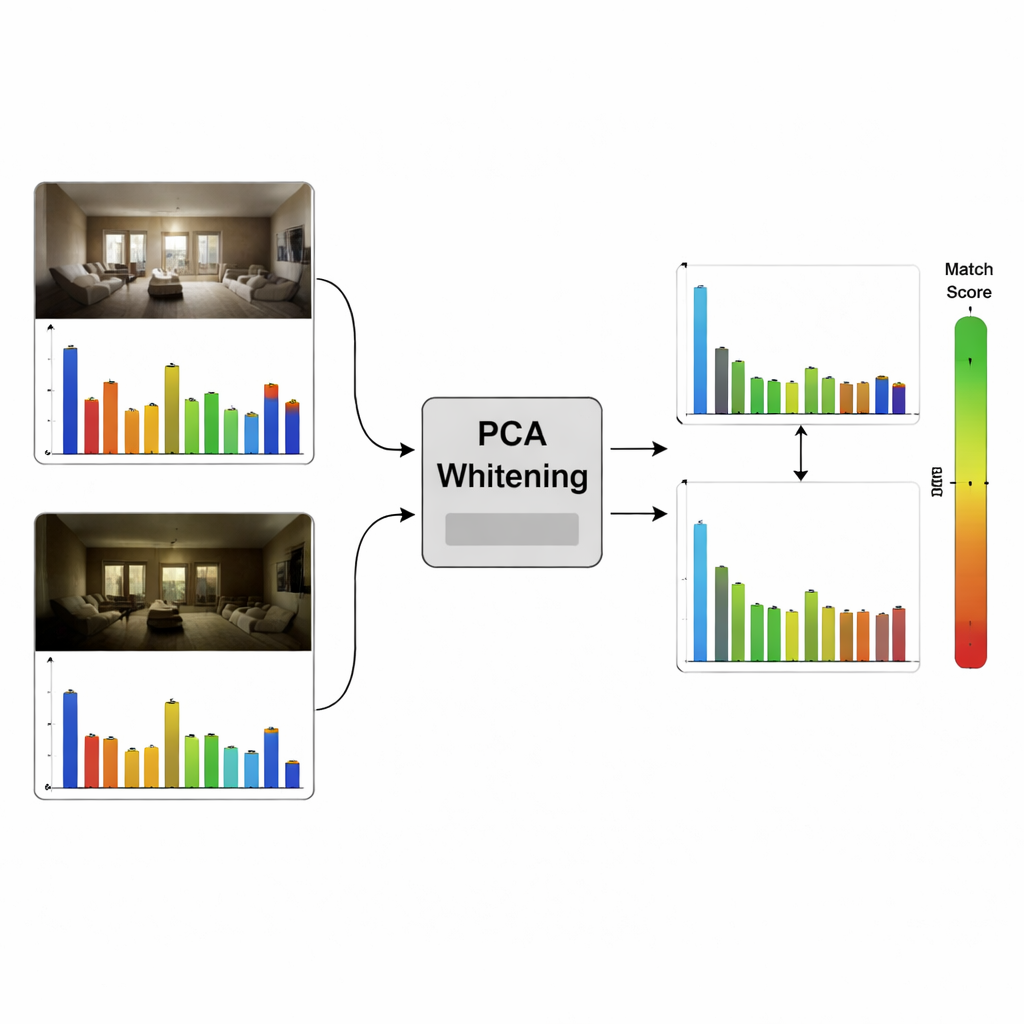
尽管傅里叶特征紧凑且计算快速,但当同一地点的记录在光照上有较大差异时,它们仍然会遇到困难。自然图像往往在低频处具有远高于高频的能量,这种不平衡会受到光照的影响。结果,描述子的某些部分会主导相似性度量,而且由于全景中相邻行相似,许多条目相互高度相关。如果不加以修正,系统判断两幅图像是否为同一地点会被一小部分冗余的数值驱动,从而在不同光照条件下变得脆弱。
用 PCA 白化清理信号
作者建议在傅里叶描述子之后加入 PCA 白化作为后处理步骤。利用来自七个室内环境的一组训练全景,系统学习描述子条目如何变化及其相关性。PCA 白化随后将描述子重新中心化,旋转到独立变化的方向,并对每个方向重新缩放,使它们具有相同的影响力。这消除了冗余的相关性并平衡了不同频率的贡献。由于变换后的条目按重要性排序,描述子也可以通过截断尾部安全地缩短。在三个未见过的环境、且包含多种光照变体的实验中,白化一致地提高了正确地点出现在检索候选前列的概率,特别是在仅返回少量可能匹配项这一对实际应用重要的情形下。
轻量但能与深度学习竞争
为了评估这种精简方法与当前趋势的对比,论文将其与 AnyLoc(一种基于大型视觉变换器网络的最新视觉定位方法)进行了比较。AnyLoc 也使用基于 PCA 的压缩,但它起始于深度学习产生的高维特征。在室内全景数据集上,当系统允许提出大约十个候选图像时,白化的傅里叶特征能够匹配甚至优于 AnyLoc,这对于许多机器人来说是现实的操作点。关键在于,基于傅里叶的方法运行开销要低得多:它依赖快速傅里叶变换和在 CPU 上进行的简单矩阵运算,而 AnyLoc 需要强大的 GPU 且每张图像耗时更多。
这对日常机器人意味着什么
对普通读者而言,核心信息是:巧妙使用经典数学在某些任务上仍能与重量级人工智能抗衡。通过将全景图像转换为平衡且去相关的描述子,PCA 白化使一种简单的基于频率的定位方法在光照变化下更加稳健。采用此方法的机器人能够在家庭和办公环境中,在多种照明条件下可靠地定位自己,同时只需有限的计算资源。这使得稳健的视觉导航对更小、更便宜的机器人更加可及,这类机器人未来可能与我们共享日常空间。
引用: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
关键词: 视觉定位, 移动机器人, 全景成像, 傅里叶特征, PCA 白化