Clear Sky Science · zh
用于自主移动机器人的具有动态转向控制的增强型纯追踪法及其在化工厂安全导航中的应用
保持在轨的机器人
随着机器人从洁净的厂房走入农田和化工厂,它们必须以极高精度沿窄小路径行驶。一点点晃动可能压坏作物、撞到管道,或滚入存在易燃气体的区域。本文介绍了一种新的轮式机器人转向与速度控制方法,使其在开阔空间和狭窄工业场地均能贴近规划路线行驶。
为什么引导机器人很难
如今许多自主移动机器人使用一种称为“纯追踪”(pure pursuit)的简单规则来跟随路径。机器人在路线前方看一小段距离,将朝向该点,然后快速重复这一过程。在实际应用中,工程师必须决定机器人“前瞻”多远以及行驶速度多快。如果前瞻距离太短,机器人会反应过于敏感并左右摇摆;如果太长,反应变慢,会在拐角处尤其是在较高速度下过弯切角。户外还有另一层复杂性:机器人位置由卫星信号、惯性传感器和车轮里程计等数据融合估计,这些数据各自存在误差与延迟。
一种更智能的转向与速度设定
作者提出了一种称为带动态转向控制的纯追踪(PP-DSC)的增强方法。与保持前瞻距离和速度不变不同,机器人根据转向急缓实时调整二者。当转向角度小、路径近似直线时,机器人使用更长的前瞻距离和更高的速度以获得平顺高效的行驶;当曲率增大时,前瞻距离缩短、速度自动下降,给机器人更多时间响应并降低横向漂移。该策略在一台四轮、类汽车机器人上实现,结合现代机器人软件框架以及高精度卫星定位、惯性传感器和车轮编码器对运动进行估计。

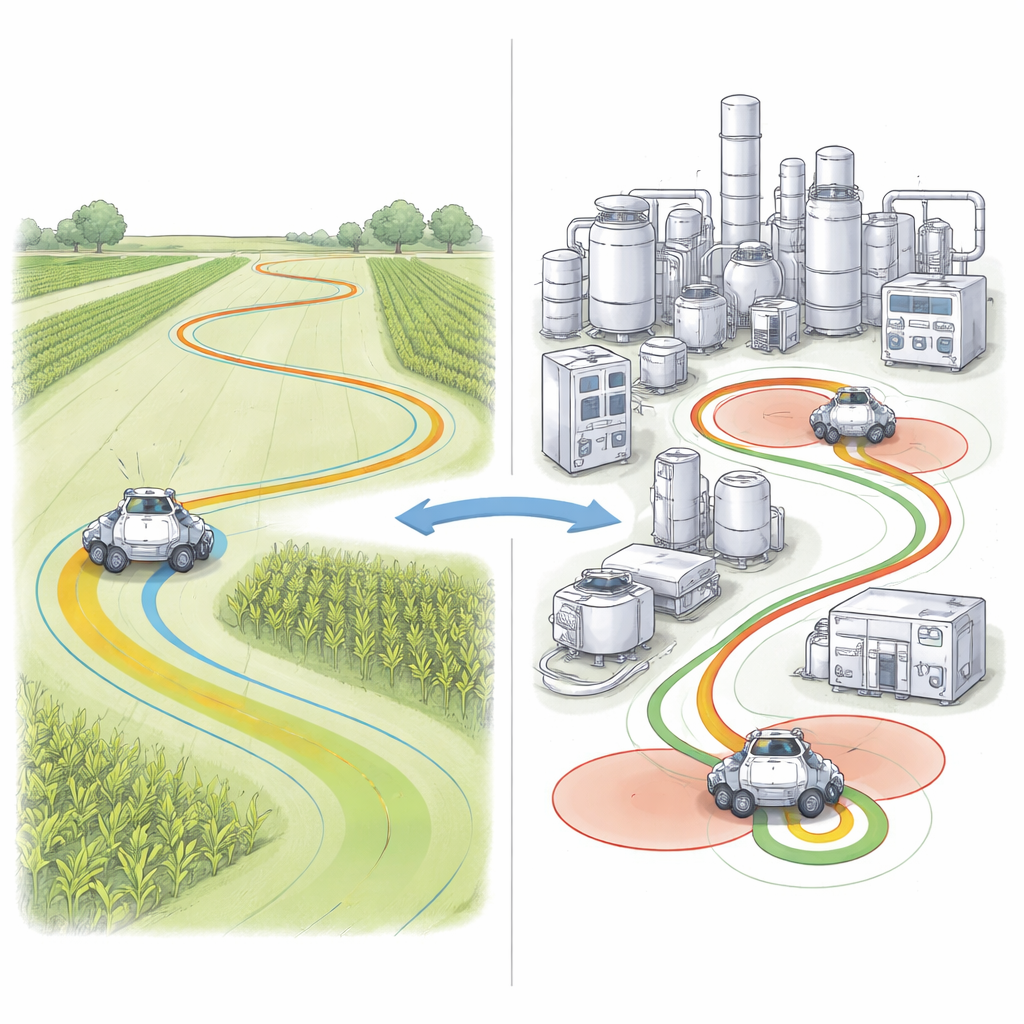
在田间与虚拟化工厂的测试
为了检验 PP-DSC 的效果,团队在户外对三种基本路径进行了实验:直线、环路和八字形,速度从每秒1米到5米不等。他们将新方法与标准纯追踪法进行了比较。改进后的控制器在所有情况下都使机器人更贴近预定路径。在直线上,平均横向误差降至约5厘米;在曲线上,误差低于8厘米。相比之下,传统方法在进入或离开弯道时会出现数十厘米的漂移和更大的峰值,尤其在较高速度下更为明显。
在危险区域增加安全性
研究人员还考察了此类机器人在化工厂内的行为,例如检查高温反应器或运送样品。研究没有搭建完整的工业试验台,而是使用了包含设备位置和高火灾爆炸风险区的生物柴油厂详细计算机模型。他们在控制器中加入了一个安全因子,当机器人进入这些危险区域时,基于流程安全中常用的火灾与爆炸指数,自动降低速度。模拟显示,该具备安全感知的 PP-DSC 仅使跟踪误差略微增加——平均不到1%——同时确保机器人在危险设备周围降低行驶速度。
为不同任务选择合适工具
一个有趣的发现是,没有一种转向策略能在所有场景中都最好。在曲率较小的开阔地带,动态方法显著优于传统方法,即使在较高速度下也能保持路径紧凑和平顺。然而在化工厂狭窄的几何环境中,固定前瞻的简单纯追踪有时表现更好,尤其在紧密环路和自交的“八字形”路线上,动态前瞻可能意外地将机器人引向错误的路径分支。作者得出结论:机器人应根据路径形状在策略间切换——对中等弯道和需考虑危险的行驶使用增强且集成安全性的控制器,而对非常紧凑或环绕的轨迹则回退到固定前瞻方案。对非专业读者而言,主要信息是:在真实工厂和田地中实现安全可靠的机器人导航,不仅仅依赖于良好的地图和传感器——机器人选择观察方向和行驶速度的方式同样至关重要。
引用: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
关键词: 自主移动机器人, 路径跟踪, 转向控制, GNSS-RTK 导航, 化工厂安全