Clear Sky Science · zh
用于露天矿无人机巡检的轻量级目标检测与多目标跟踪
更聪明的空中之眼
露天矿区广阔且环境恶劣,重型卡车、挖掘机和人员持续移动。要保证安全与高效运行,通常需要大量地面人员和昂贵的定位设备,但小故障和入侵者仍可能被漏掉。本文探讨了如何让轻量级智能无人机从空中巡逻矿区,在机载电子设备受限的情况下,实时自动识别设备、人员和异常情况。
为什么矿区需要更好的看护手段
现代矿区已依赖卫星定位和专用无线信标等工具来跟踪卡车和机械。但这些“主动”系统存在盲点:信号可能被陡峭的边坡、扬尘或干扰遮挡,而且仅对携带相应设备的车辆和人员有效,也无法直观展示故障的具体样貌。相比之下,无人机能飞越复杂地形,采集丰富的图像和视频,并追踪不配合的目标如擅自进入的车辆。挑战在于强大的视觉算法通常需要性能强劲的计算平台,而无人机在重量、功耗和计算能力上受限。作者旨在设计一种既准确又轻量、能直接在无人机上运行的检测与跟踪系统。
教无人机识别小型与隐蔽目标
工作的核心是对一种流行的视觉模型YOLO进行升级,专门针对露天矿区进行调优。研究者重构了模型的“骨干网络”,使其能够跟随卡车、挖掘机和石堆的不规则轮廓,而不依赖刚性的网格式滤波器。他们还重新设计了网络中融合粗细尺度信息的部分,以便同时捕捉远处细小的机械和近处较大的目标而不混淆。在此基础上,一个新的轻量级决策模块聚焦场景中最具信息量的细节,帮助系统在杂乱背景中区分小型故障点和部分遮挡的机械。
让强大模型适配无人机
即便有这些改进,视觉模型也容易变得过大而无法在无人机硬件上运行。为此,团队采用了一种精细的剪枝策略,分析哪些内部连接对性能贡献最大,然后裁剪掉其余部分。该过程在保留网络中最关键路径的同时缩减参数量和计算量。在最佳剪枝水平下,系统保持较高的检测精度,同时将模型体积、运算量和响应时间降低到足以在紧凑的嵌入式处理器上运行的程度,减少功耗并延长飞行时间。在自建矿区数据集和公开无人机基准上的测试表明,剪枝后的模型优于若干知名替代方案,尤其在小型和部分遮挡目标上表现突出。
从静态快照到平滑轨迹
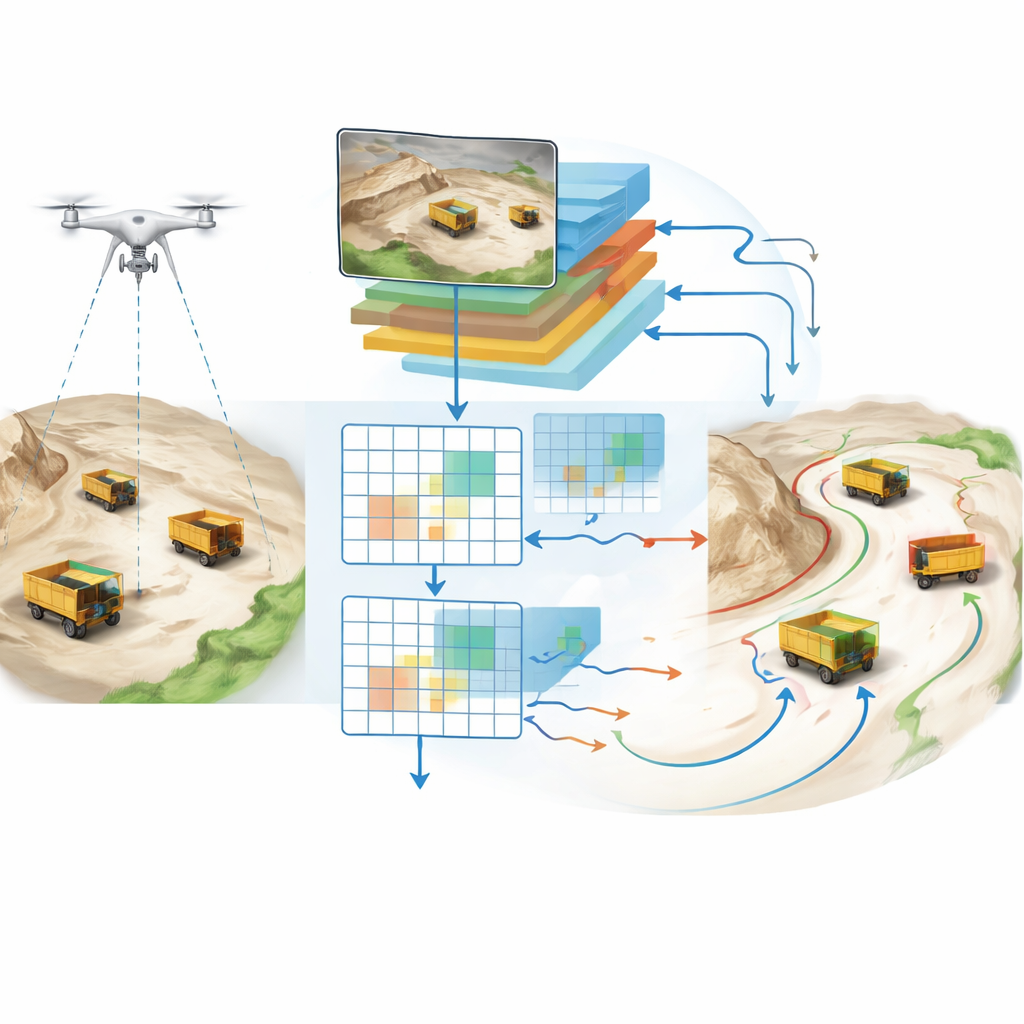
单张图像中的目标检测只是问题的一半;矿区还需要了解每辆车或每个人随时间的运动轨迹。为此,作者增强了现有的多目标跟踪方法,使其更好地应对拥挤场景、外观相似的车辆和突发的运动变化。他们构建了一个综合相似性度量,考虑目标的位置、外观,甚至是否为载货或空载的状态。并对运动预测进行了修正,以适应加速度变化,例如车辆转弯或爬坡时的情况。上述步骤共同减少了身份互换(将一辆车误认为另一辆)的情况,使轨迹更平滑可靠,同时速度足够快,可在无人机级硬件上实时运行。
走向无人化、全天候的矿区巡逻
最后,作者将视觉与跟踪模块集成进一个多层次巡检系统,该系统可协调多架无人机、通过5G和临时链路流式传输数据,并将结果回传地面指挥。在真实矿区的实验中,这一方案相比传统方法显著提高了设备监测的准确性和稳定性。对非专业读者来说,关键结论是该研究展示了一个可行路径:使用小型、高效的飞行机器人持续守护大型工业场所,及时发现小故障、未注册入侵者和潜在风险——而无需在每辆车上安装笨重的计算设备或大量信标网络。
引用: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
关键词: 无人机巡检, 露天采矿, 目标检测, 多目标跟踪, 轻量级人工智能模型