Clear Sky Science · zh
基于猕猴腹侧前运动区活动的皮层内脑机接口
教大脑移动光标
想象一下仅凭思维就能操纵计算机光标或机器人手臂,即便你的肌肉已无法动作。脑—机接口(BMI)旨在通过将大脑活动转化为外部设备指令来实现这一点。到目前为止,大多数系统主要利用大脑的一个主要运动区——但如果该区域受损,如中风或肌萎缩侧索硬化症(ALS)怎么办?本研究探讨另一个邻近区域能否同样可靠地驱动BMI:该区通常与手部动作的计划以及观察他人动作有关。
一个新脑区加入队伍
经典的BMI主要读取来自初级运动皮层的信号——直接控制随意运动的那条皮层带——以及邻近的一个计划区称为背侧前运动皮层。研究者把注意力转向另一个邻区:腹侧前运动皮层,具体是一个称为F5c的区域。在猴子中,F5c富含在动物到达和抓取物体时以及仅观察屏幕上动作时也会发放的神经元。这种运动与观察反应的混合表明,F5c可能适合在不需要身体移动的情况下控制光标或机器人“化身”。
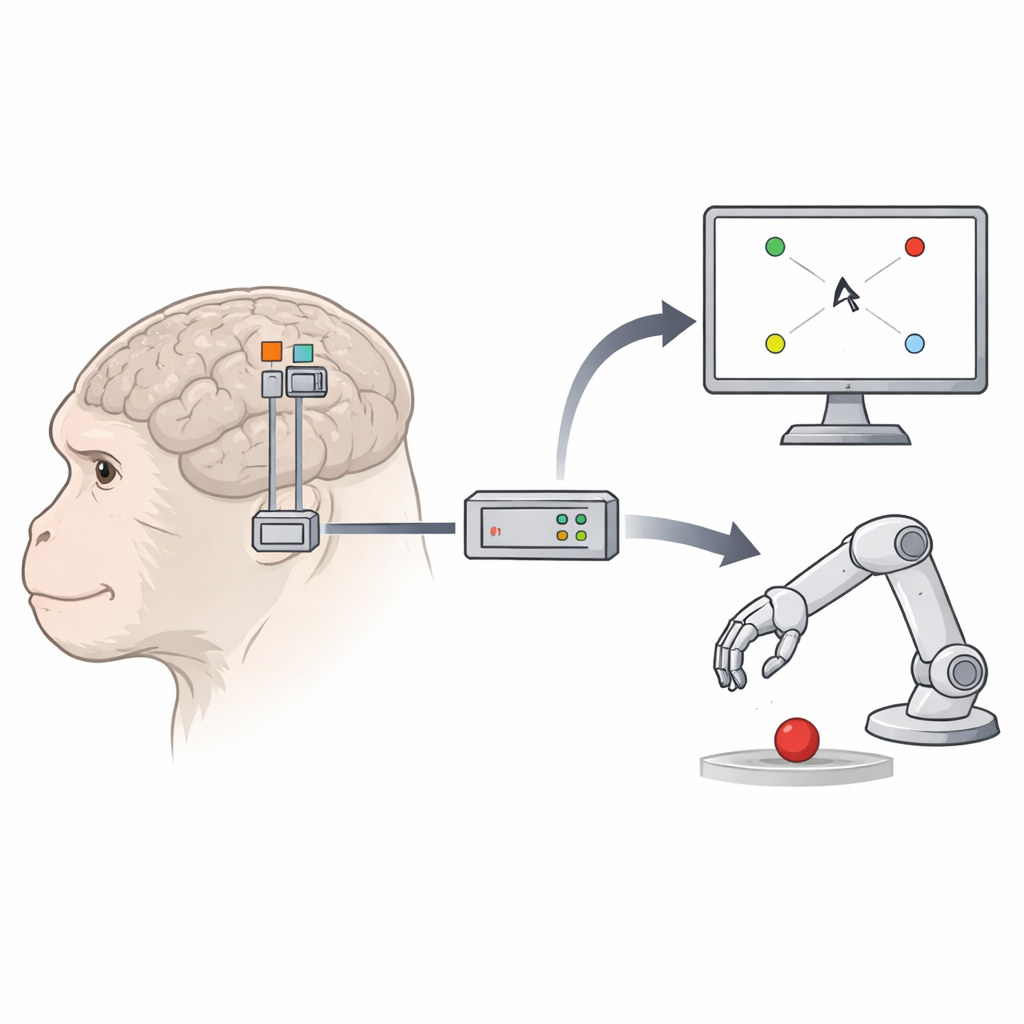
猴子、微电极与移动目标
两只猕猴在三个位置植入了微小的96电极阵列:初级运动皮层、背侧前运动皮层和F5c。在日常实验中,动物执行若干视觉上简单但行为上要求较高的任务。在一项任务中,它们触摸屏幕中央,然后向八个外围目标之一伸手,同时屏幕上的小方块光标从中心移动到相同目标。第二项任务中,它们保持手不动,仅观看光标移动到目标。第三种更逼真的设置中,光标被一个三维机器人手臂化身替代,在虚拟场景中朝目标伸手。通过这些任务,团队可以比较每个脑区驱动光标或化身运动的能力。
如何把脑信号变成平滑的运动
在训练阶段,光标或化身沿着计算机生成的、轻微弯曲的路径移动,同时猴子要么动作要么观看。与此同时,电极记录到快速的脑活动爆发。研究者随后训练了解码器——一种学习将神经放电模式映射为屏幕上光标或化身速度的数学工具。为只捕捉最有信息量的通道,他们选择了随运动方向和速度变化的电极。他们使用一种能分离出与行为最密切相关的大脑模式的方法,并用非线性步骤增强它,从而使系统能捕捉更复杂的神经活动与运动之间的关系。在解码阶段,计算机停止直接驱动光标或化身;取而代之的是解码器每50毫秒使用实时脑信号来控制屏幕上的运动。解码器在后台定期重新训练,以便随着神经反应随时间变化而调整。

“新”区域表现如何?
关键问题是F5c能否匹配或接近传统控制区的表现。在两只猴子中,基于F5c的解码在初期驱动光标时确实落后,尤其是在动物仅观看而不自己移动手时。但随着实验进展——以及越来越多电极提供可靠的与运动相关的信号——F5c迎头赶上。在若干条件下,其表现达到了初级运动皮层的水平,甚至在后期会话中在被动光标控制方面超过了初级运动皮层。在控制机器人化身时,各区的总体成功率都较低,但F5c仍支持有意义的控制,尤其是在结合一种轻度辅助算法时,该算法能微妙地将化身引向目标。重要的是,三个区域的神经元在计算机驱动训练阶段和主动控制阶段显示出相似的方向调谐和群体活动模式,只有部分神经元在猴子学习驱动BMI时改变了其优选方向。
对未来神经技术的意义
对非专业读者而言,关键结论是:曾被主要视为动作计划和观察的腹侧前运动区F5c,也可以作为脑—机接口的实际控制中心。当存在足够的与运动相关的信号时,基于F5c活动训练的解码器可以引导屏幕光标或辅助机器人,效果几乎与基于经典运动区的解码器相当。这表明未来的临床BMI可能不必依赖单一皮层区域。对于初级运动皮层受损的人来说,诸如腹侧前运动皮层这样的邻近计划区可能为重新控制数字工具、假肢设备或移动辅助装置提供替代通路。
引用: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
关键词: 脑机接口, 运动皮层, 前运动皮层, 神经解码, 假肢控制