Clear Sky Science · zh
基于虚拟结构的三型模糊系统用于非线性系统中传感器与执行器故障的预测检测、补偿与控制
当零件出问题时让机器保持在正轨上
从工厂车间的机械臂到调节酸碱度的化工装置,现代技术依赖传感器和执行器在幕后默默维持运行。但当这些部件漂移、卡滞或失效时,系统可能在被发现之前就变得不安全。本文提出了一种新方法,使机器能够自行感知并纠正此类问题,即便工程师并不掌握系统内部行为的精确数学模型。
隐藏故障为何难以捕捉
在许多现实场景中,系统行为高度非线性:输入的微小变化可能导致输出出现大幅且不可预期的波动。传统控制方法假设设计者已知支配该行为的方程,并且传感器与执行器大体正常。实际上,部件会老化、噪声增多,或被稍有差异的硬件替换。常规的容错控制要么内置固定安全余量(被动方法),要么依赖精确模型来检测并适应故障(主动方法)。当系统随时间变化或其内部机理并不完全被知晓时,这两类方法都很难奏效。作者认为工业界需要那种能从实时数据中学习、识别传感器或执行器何时异常,并在无需详尽系统蓝图的前提下实时校正故障的控制器。
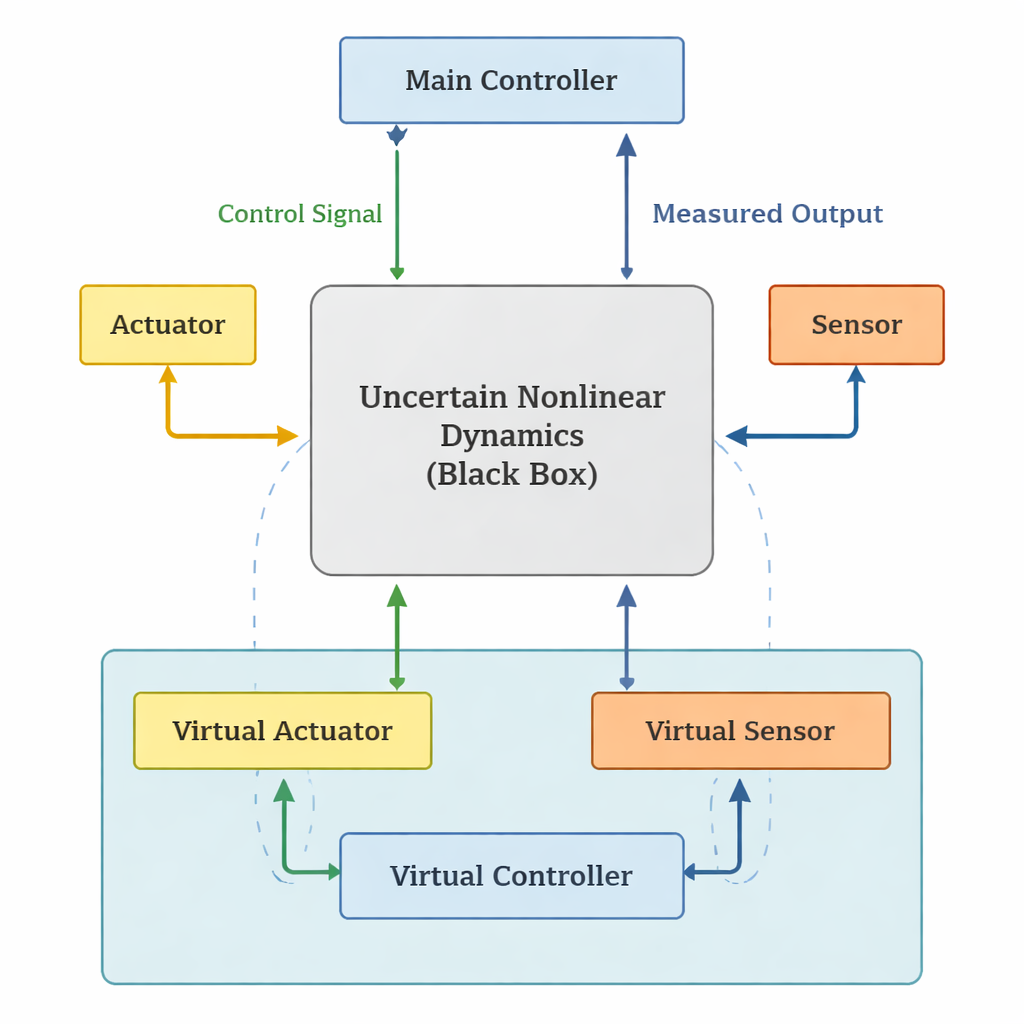
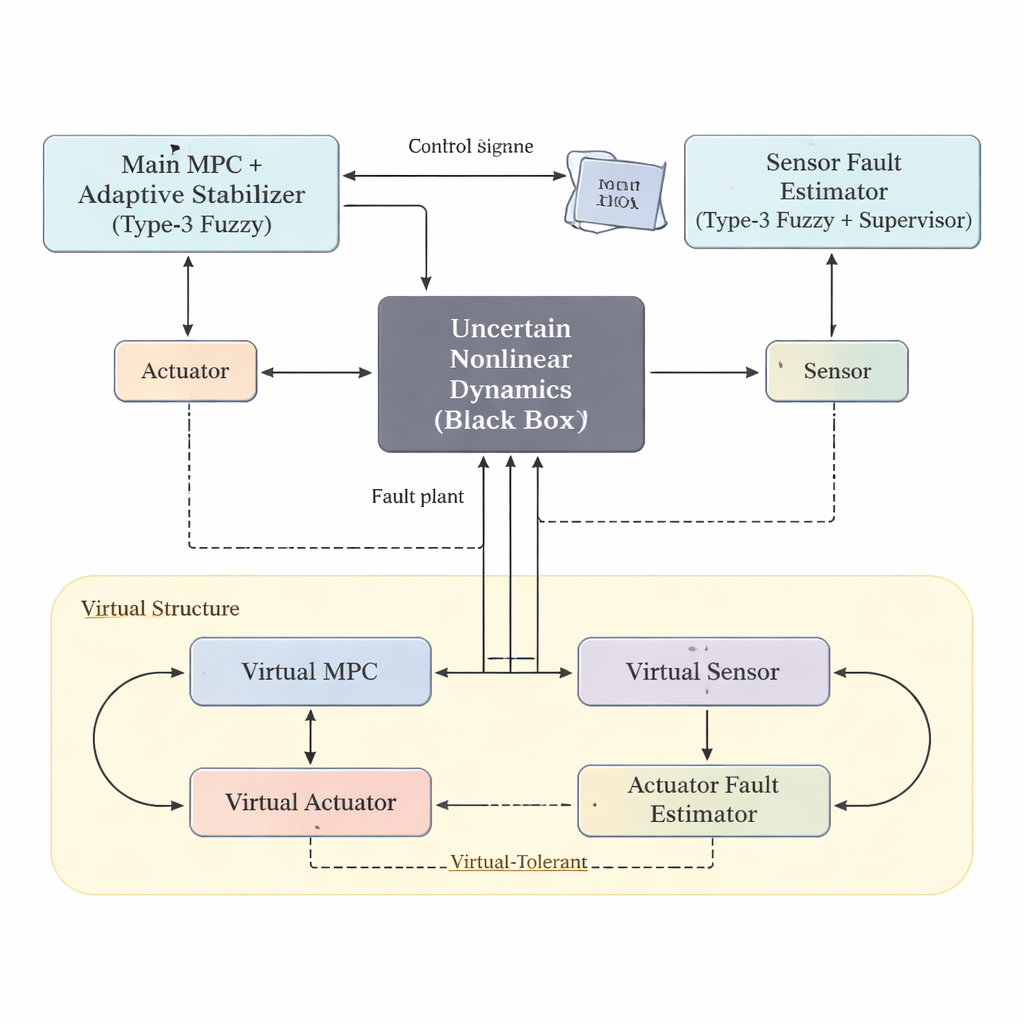
将系统视为黑箱的学习型控制器
所提出的框架将被控对象纯粹视为黑箱:它只观察发出的控制信号和传感器测得的输出。核心是三型模糊逻辑系统,这是一种旨在处理强不确定性和测量噪声的高级模糊建模形式。该模糊系统在线学习未知动力学的紧凑输入—输出描述,同时模型预测控制器(MPC)利用该学习到的模型在短预测区间内规划未来控制动作。一个自适应稳定单元并行运行,以确保即便模型不完备或参数漂移,组合反馈仍能使跟踪误差有界并最终趋于零。
监视监视器:检测传感器与执行器故障
框架将故障处理分为两个协同部分。首先,传感器故障单元采用两个额外的三型模糊估计器加上一个监管模块来推断某个传感器读数相较其预期稳态值偏离了多少。基于此,它生成一个校正信号,有效地“反向弯曲”有故障的测量,使主控制器继续看到可信的输出。其次,该方法构建了一个虚拟结构以镜像真实系统:它包含虚拟传感器、虚拟执行器、自己的模糊辨识器和一个虚拟MPC。由于虚拟回路不受真实执行器退化的影响,虚实控制路径之间的差异揭示了真实执行器的故障程度。一个简单的公式将这一差距转化为估计的故障水平,随后在主控制信号中进行补偿。
证明稳定性并在机器人与化工罐上验证
为了表明该方法不仅直观而且在数学上是可靠的,作者构造了一个Lyapunov函数——一种包含跟踪误差、建模误差和可调模糊参数的能量度量。他们为自适应项推导出更新律,使该能量始终递减,证明即便在干扰和故障存在时误差也会随时间收缩。随后通过仿真在两个截然不同的实例上测试该方法:单自由度机械臂和化学罐中的pH中和过程。在两种情况下,真实动力学均被视为完全未知,参数变化并在运行中注入了传感器与执行器故障。控制器保持了精确的跟踪,快速学习到故障大小,并将风险和误差保持在较低水平,表现优于更简单的模糊控制器以及文献中其他先进的容错方案。
这对实际系统意味着什么
对非专业读者来说,核心信息是该方法赋予复杂系统一种内建的自我感知能力。控制器不再依赖完美模型或工程师的手动重新调参,而是持续从所见数据中学习、识别传感器或执行器何时开始失真或衰减,并自动纠正其动作以维持性能稳定。由于方法仅需要输入与输出数据,原则上可以应用于多种不同设备,而无需从头重设计。尽管结果基于仿真,且硬件层面的细节仍需进一步探索,该工作指向了更具鲁棒性的机器人、工业流程及其他自治系统,使其即便在组件和环境远非理想时仍能保持可靠。
引用: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
关键词: 容错控制, 模糊逻辑, 预测模型控制, 传感器与执行器故障, 非线性系统