Clear Sky Science · zh
无序物流中包裹分拣定位方法研究
更聪明的包裹分拣为何重要
你下的每一笔网购都会在大型物流中心触发一场隐秘的箱包舞蹈。包裹在飞向你家门口之前,必须先被找到、拾取、测量、扫描并分流——而这些工作常常要从一堆混杂且凌乱的包裹中进行。如今,这一“理清混乱”的首道工序很大程度上仍依赖人工来完成枯燥且费力的重复作业。本文提出了一种新的基于视觉的方法,帮助机器人在杂乱的包裹堆中可靠地定位抓取点,使包裹分拣向完全自动化、更快且更少人工的方向迈出一步。
从凌乱堆叠到机器人友好的数据
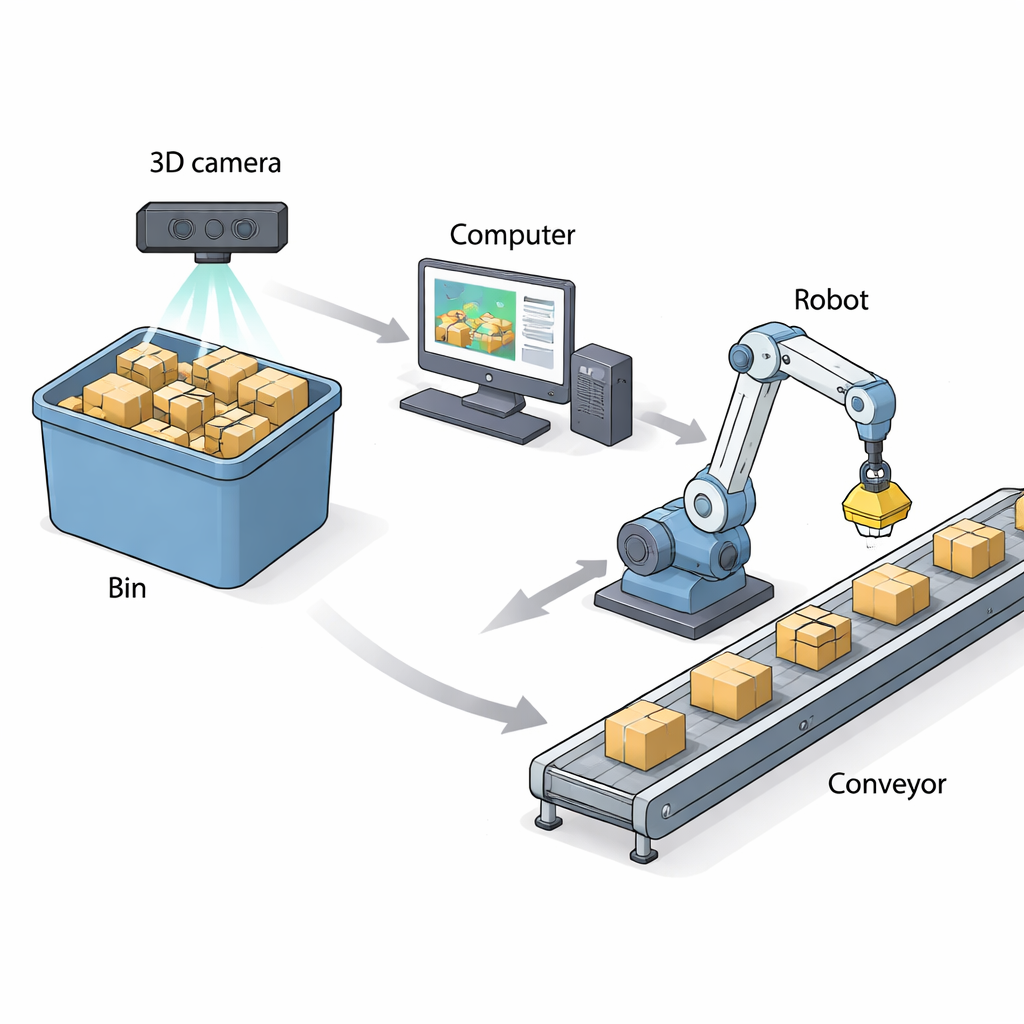
研究者将目标定义为“无序”物流包裹:被随意扔入箱内、没有固定排列、并且有时因叠放而挤压变形的普通纸箱和软质信封。要在这种脏乱环境中替代人工,机器人首先必须确切知道在目标包裹表面何处伸手以及如何调整抓取器的姿态。团队构建了一个以 3D 相机为核心的系统,该相机同时捕获彩色图像和包裹顶层的深度图。基于 YOLOv8 的现代识别网络在彩色图像中检测出单个包裹,而深度图则揭示了它们的三维形态。二者结合使计算机能够先挑选出下一个最合适抓取的包裹——既不过度遮挡也与箱沿保持足够距离——然后计算准确的抓取点。
用三点与“影子”找到稳定抓取点
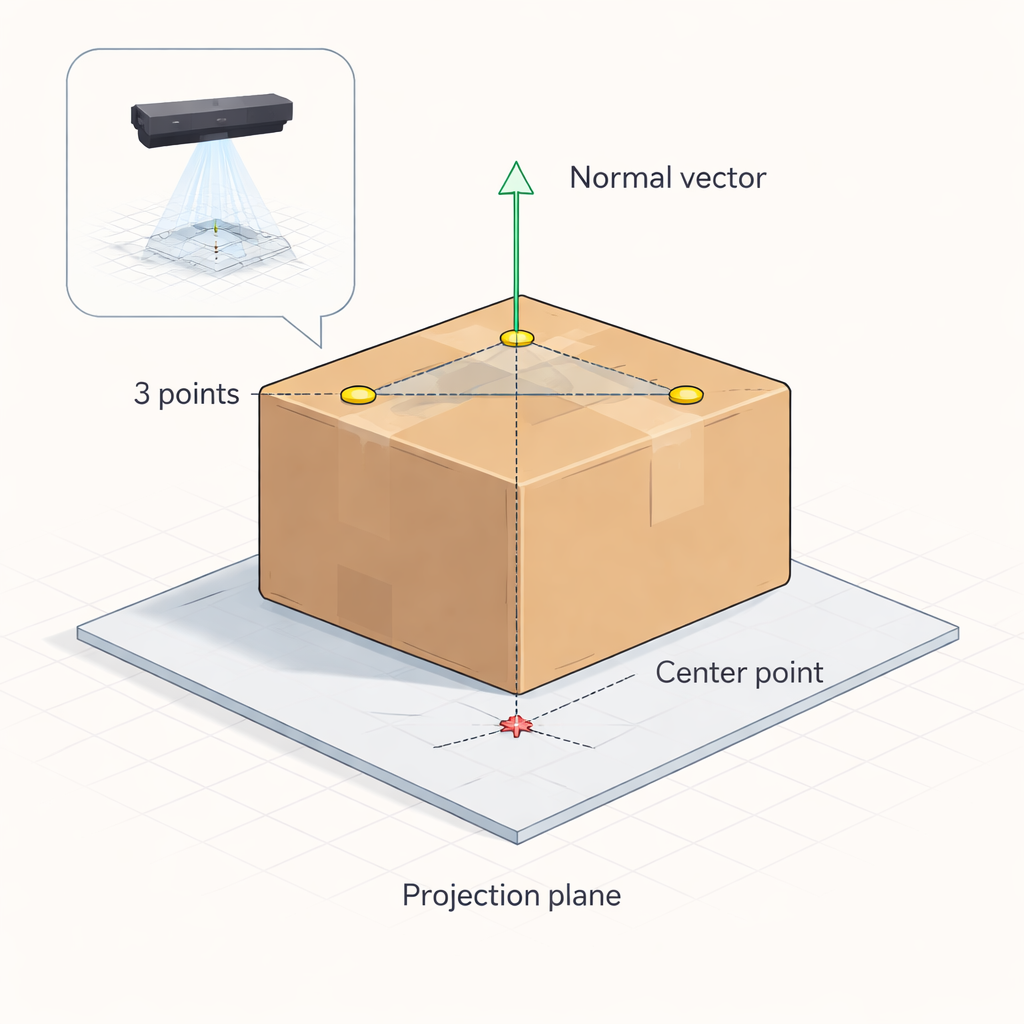
方法的核心是一种几何技巧,作者称之为三点定向—投影中心化算法。一旦选定目标包裹,系统就从深度数据中随机选择其上表面的三个点。这三点定义了一个平面,就像桌面上的三根别针定义了桌面的倾斜一样。由此计算出的法向量是一条垂直于包裹表面的直线。与此同时,系统在图像中利用包裹的四个顶点推断其投影轮廓的几何中心,类似于找到矩形“影子”的中心。将平面的朝向与该中心位置结合起来,就能得到精确的三维抓取位置以及包裹顶表面的倾斜角度,从而为机器人吸盘或夹爪提供抓取指引。
应对被压扁或鼓起的包裹
真实包裹并非完美的立方体:气泡信封会下垂,软袋会鼓起,纸箱在受力时会弯曲。简单的平面假设在这些情况下会失效。为此,作者在数学模型中区分了三种情形:近似平坦的包裹、凸起(鼓起)顶部和凹陷(下垂)表面。系统先通过比较包裹表面最高和最低深度值来判断是否存在显著变形。如果存在,则分析变形表面与设想参考平面之间的相交情况,并对该交线拟合出一个近似椭圆。由此求解出一个“最优”平面,它能最好地代表一个稳定的抓取表面——即便真实表面存在下垂或鼓起——然后再将关键抓取点投影回该平面。
将算法付诸检验
为验证算法的实际效果,团队搭建了一个测试台:包含一台六轴工业机器人、一个 3D 相机和一个自制的激光与探针定位装置。首先,他们在每个测试包裹的顶面标记真实的几何中心,并用两束激光精确定位该物理点在空间中的位置。接着让视觉算法计算其估计中心,并指令机器人将第二个探针移动到该估计点。通过测量两个探针端点之间的微小偏移,就可以算出定位误差。对刚性木箱模型和真实包装材料(瓦楞纸箱、气泡信封和塑料袋,尺寸最多至 250×250 毫米)进行的测试显示,最大定位误差约为 1.7 毫米,各轴平均误差接近每轴 1 毫米。每个包裹的完整计算耗时约 17.5 毫秒,足以满足高通量分拣线的速度需求。
这对未来仓库意味着什么
简而言之,研究表明配备 3D 相机并采用这种三点投影算法的机器人,能够以毫米级精度可靠地判断在杂乱箱内如何以及从何处抓取包裹。虽然对于非常软的严重变形包裹,精度会有所下降,但该方法在现实仓储条件下仍表现出足够的鲁棒性。随着包裹量持续增长和劳动力短缺问题的存在,这类算法可以把最沉重且最重复的分拣任务从人转移到机器上,从而降低危险性、减少乏味劳动,同时帮助电商物流体系更平稳地运转。
引用: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
关键词: 3D 视觉, 包裹分拣, 机器人抓取, 物流自动化, 物体定位