Clear Sky Science · zh
模块化缆索悬挂并联机器人的一种可重构分析与工作空间优化
在看不见的轨道上行进的机器人
想象一种机器人,它可以在体育场上平稳滑动大型摄像机、在工地上升运建筑材料,或在病人周围引导康复设备——这一切都通过缆索悬挂完成,而不是依赖刚性臂。本文介绍了一种新型缆索悬挂机器人,其结构可以按需重塑,使一台设备能够适应多种任务,同时最大限度地利用其工作空间中的有用运动。
用可互换部件搭建机器人
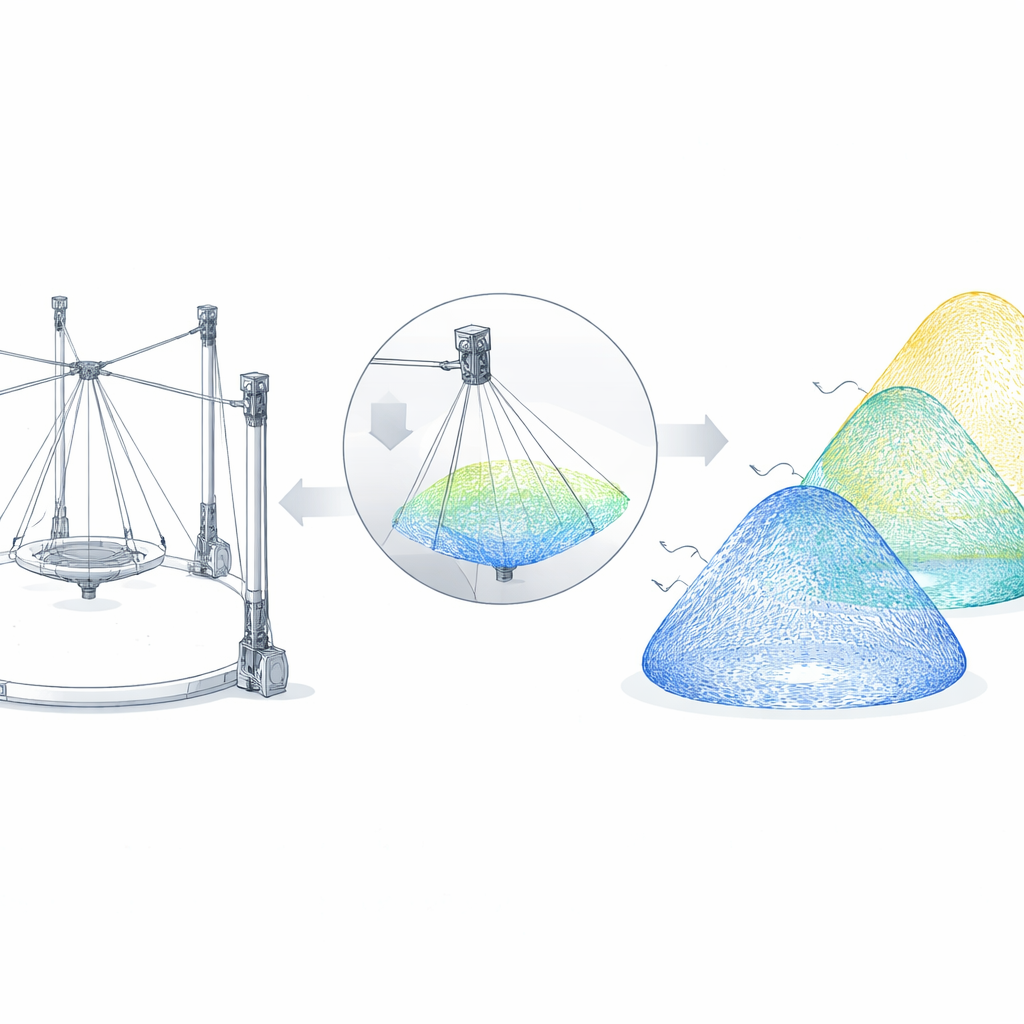
研究的核心是模块化缆索悬挂并联机器人(MCSPR)。它不使用固定的金属臂,而是由最多六个相同的“分支”组成,每个分支是带有电机、滑轮和与中心移动平台(称为末端执行器)相连缆索的塔架。这些分支沿圆形导轨排列,可被添加、移除、旋转或升降。通过重新布置它们,同一套硬件可以表现为多种不同的机器人:两分支时可在平面内运动,三或四分支时可在空间自由运动,五或六分支时还能实现平台的多方向俯仰和旋转。

规划这台变形机器的“骨架”
设计这样一个灵活的系统并非仅仅把零件拧在一起。作者采用系统性的“结构综合”方法,将每根缆索、滑轮与关节视为网络中的基本构件。通过类似图论的示意图,他们描绘这些要素如何连接,以使平台获得期望的自由度——例如沿三轴滑动或绕这些轴旋转。这份模块与连接的目录可作为设计工具包:根据任务所需的运动,设计者可以选择使用多少分支以及将它们放置在圆形导轨的何处,从而有把握地得到预期的结构行为。
预测平台将如何运动
由于平台由只能拉不能推的缆索悬挂,预测其运动比传统机器人更为复杂。团队建立了一套统一的数学描述,适用于MCSPR的五种主要构型。给定平台期望的位置与姿态,他们精确计算每根缆索的长度以及长度变化速度。随后他们制作了物理原型,让平台在空间中沿平滑的螺旋路径移动。缆索上的传感器记录了实际运动,这些记录与预测高度一致。这验证了该模型在几何重构时仍能可靠地控制机器人。
找出机器人能安全静止的区域
同样重要的是要了解悬挂平台能够保持平衡的位置。如果任何缆索松弛,控制就会丧失。作者关注所谓的静态平衡工作空间:在只有重力作用时,所有缆索都能保持正张力的空间区域。采用蒙特卡洛方法,他们随机采样大量可能的平台位置与姿态,并逐一检查维持该姿态所需的缆索张力是否都在安全范围内。被接受的样本形成一个三维云团,勾勒出机器人可用的工作体积。
通过精巧调节扩展机器人的可达范围
由于MCSPR的分支可以改变高度与角度,且平台可承载不同质量与倾斜角的负载,这个安全体积的大小和形状并非固定。研究者在六分支配置下系统地改变这些因素。结果表明,更重的载荷会显著缩小机器人可静止的区域,而通过巧妙选择分支高度和角度间距可以扩大该区域。随后他们提出一个优化问题:调整载荷、分支高度、分支角度和平台倾角范围,以使安全工作空间体积最大化。在软件中运行该搜索后,他们找到了一个配置,使得可达且平衡的空间比简单布局大出数倍。
这对实际应用为何重要
对非专业读者而言,核心信息是:这类机器人可以像积木一样重塑,但仍能通过精确的分析与调优进行设计。将模块化硬件与严谨的数学规划和基于计算的搜索相结合,作者把一台缆索悬挂设备变成了一个多用途的平台,可适配多种任务——从精密制造到康复——同时最大化其工作空间并确保负载得到安全支撑。
引用: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
关键词: 缆索机器人, 模块化机器人, 可重构机构, 机器人工作空间, 并联操纵器