Clear Sky Science · zh
一种利用多色域的YOLO架构实现实时工业安全自动化
工厂车间更聪明的“眼睛”
金属焊缝中的隐蔽缺陷可能会将坚固的机器、桥梁或管道变成无声的危险。传统上,受过训练的检查员需要盯着发光的金属接缝,试图在细小裂纹或孔隙演变成事故之前发现它们。本文探讨了人工智能如何承担这类监视任务,使用快速的图像识别软件在实时中检查焊缝,即便零件在传送带上滚动通过也能工作。通过比较数个流行AI检测器YOLO的版本并测试不同颜色表示方法对其视觉的影响,研究者展示了一条通向更安全、更高效工厂的路径。
为什么发现坏焊缝如此困难
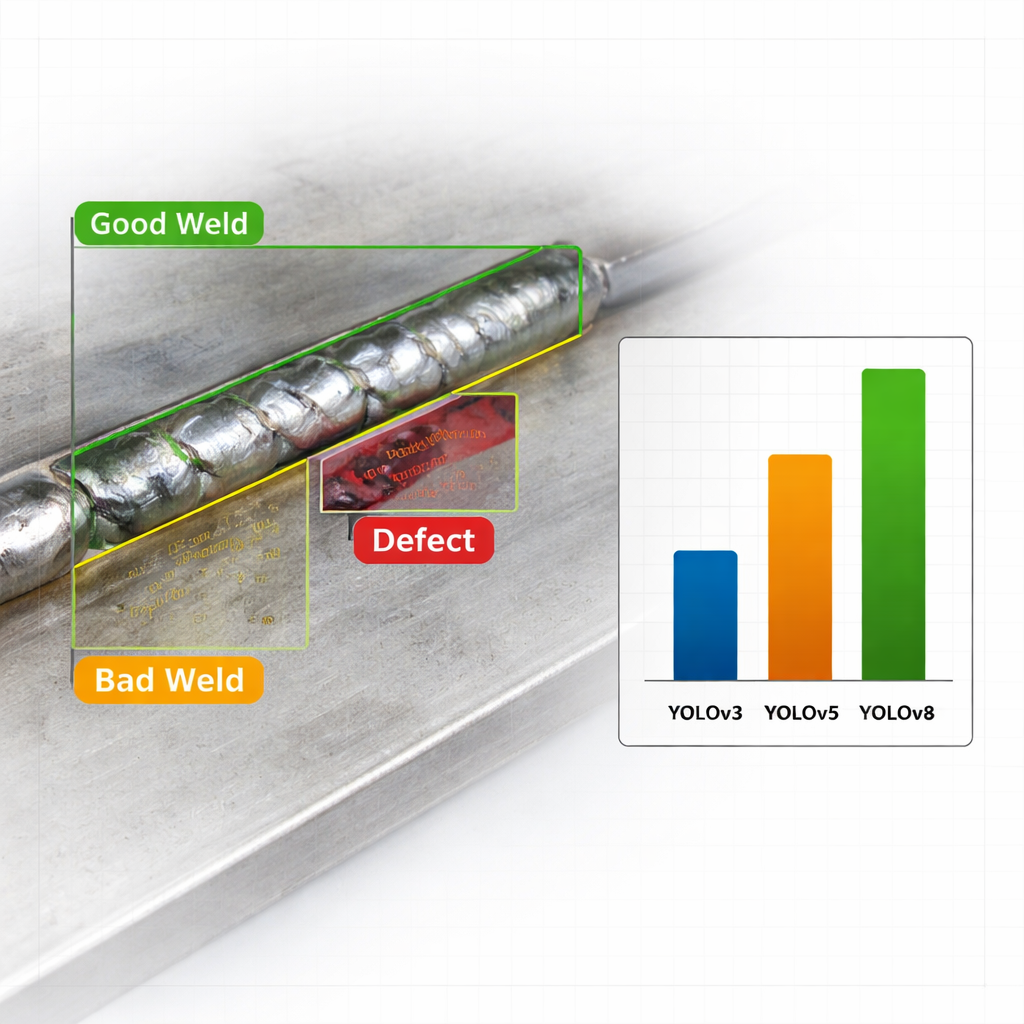
在繁忙的生产线上,焊缝在形状、光泽和背景杂乱程度上各不相同。一张图像中可能包含多个焊缝和缺陷,这使得简单的图像分类(整体判断“合格”或“不合格”)显得过于粗糙。相反,系统必须既定位又标注接缝上的具体问题区域。作者关注三个实用类别——良好焊缝、劣质焊缝和明显缺陷——因为每一类需要不同的处理,从接受零件到立即返工。他们使用了一个公开的、包含六千多张标注焊缝图像的数据集,确保AI在现实的表面、光照条件和缺陷类型范围内进行训练和测试。
教机器“一次看清并决断”
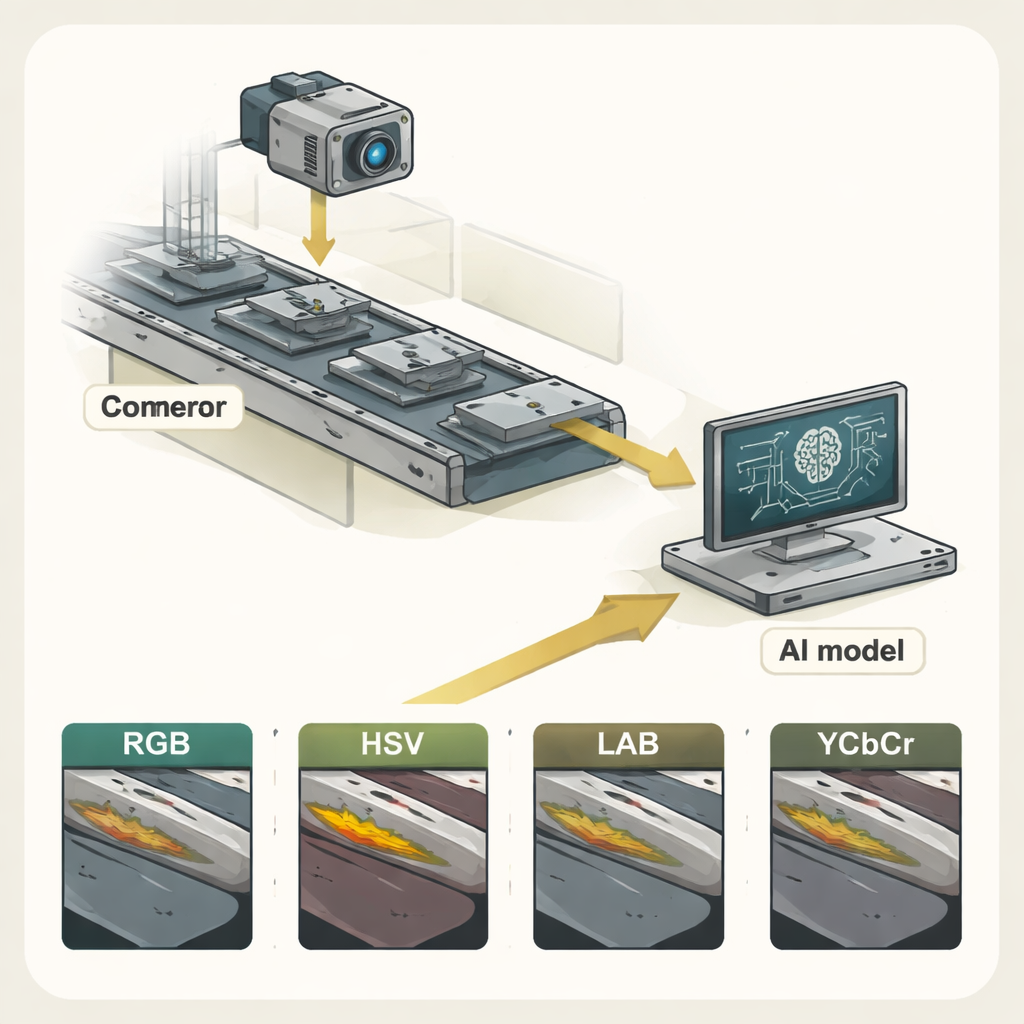
本研究聚焦于YOLO(“You Only Look Once”)系列目标检测模型,该系列以单次扫描图像并在其中绘制边框的能力著称。研究者比较了三代模型:YOLOv3、YOLOv5和最新的YOLOv8。每一代都通过更深的网络和更聪明的训练策略提升了速度和精度。为更好地模拟真实工厂的光照挑战,团队还将每张焊缝图像转换为四种不同的色彩空间——RGB(熟悉的红绿蓝)、HSV、LAB和YCbCr,并在每种色彩空间上分别训练模型。这种多光谱方法让他们提出一个关键问题:改变颜色编码方式是否能帮助AI更清楚地识别缺陷?
色彩、速度与精度的实测
在所有实验中,有一个清晰的模式:最新的模型YOLOv8优于其前身。在标准RGB图像上训练时,YOLOv8取得了归一化平均精度(mAP@0.5)为0.592的成绩,显著高于在相同条件下的YOLOv3和YOLOv5。实际意义上,这意味着它在定位和正确标注焊缝区域方面更为出色。该模型也非常快,在现代显卡上每秒大约处理138张图像——远高于通常作为实时基准的30帧每秒。在色彩空间方面,RGB对三种YOLO版本均给出最强的结果,而HSV、LAB和YCbCr则落后。这些替代编码可以突出某些视觉特征,但在本场景中它们并不能超越RGB的简洁性和信息含量。
从实验室测试到工厂边缘部署
为演示现实可行性,作者将精简的YOLOv8模型部署在基于Raspberry Pi的边缘设备上,该设备连接到传送带和摄像头。随着焊接零件在镜头下移动,系统捕获帧,通过基本预处理清理图像,并在本地运行检测,将每个焊缝分类为良好、劣质或有缺陷。结果记录到数据库并在检测仪表盘上显示,检查员可以看到实时的缺陷标注和长期质量趋势。此外,该框架还能生成建议,例如建议调整焊接速度或电压,或在反复出现缺陷时标注可能需要的设备维护。
这对更安全制造意味着什么
对非专业读者来说,关键结论很直接:这项工作表明一种轻量级、现代的AI模型可以在真实工业条件下可靠且非常迅速地标记有风险的焊缝,尤其是在使用普通RGB摄像机图像时。YOLOv8在准确区分明显不良焊缝方面足够可靠,并且速度足以跟上高速生产线,同时可在靠近机器的适度硬件上运行。作者认为,这类自动化、色彩敏感的检测可以减少人为错误、更早发现问题,并支持更安全、更一致的制造。未来的改进——比如更丰富的训练数据和对更微妙缺陷类型的改进处理——可能会使这些数字检查员成为工业安全的日常组成部分。
引用: Pati, N., Sharma, A., Gourisaria, M.K. et al. A real-time industrial safety automation using YOLO architectures leveraging diverse chromatic domains. Sci Rep 16, 7253 (2026). https://doi.org/10.1038/s41598-026-37869-1
关键词: 焊缝缺陷检测, 工业安全自动化, YOLOv8, 实时计算机视觉, 边缘人工智能