Clear Sky Science · zh
使用强化学习进行肋间机器人超声成像的自主路径规划
帮助医生穿透肋骨的机器人
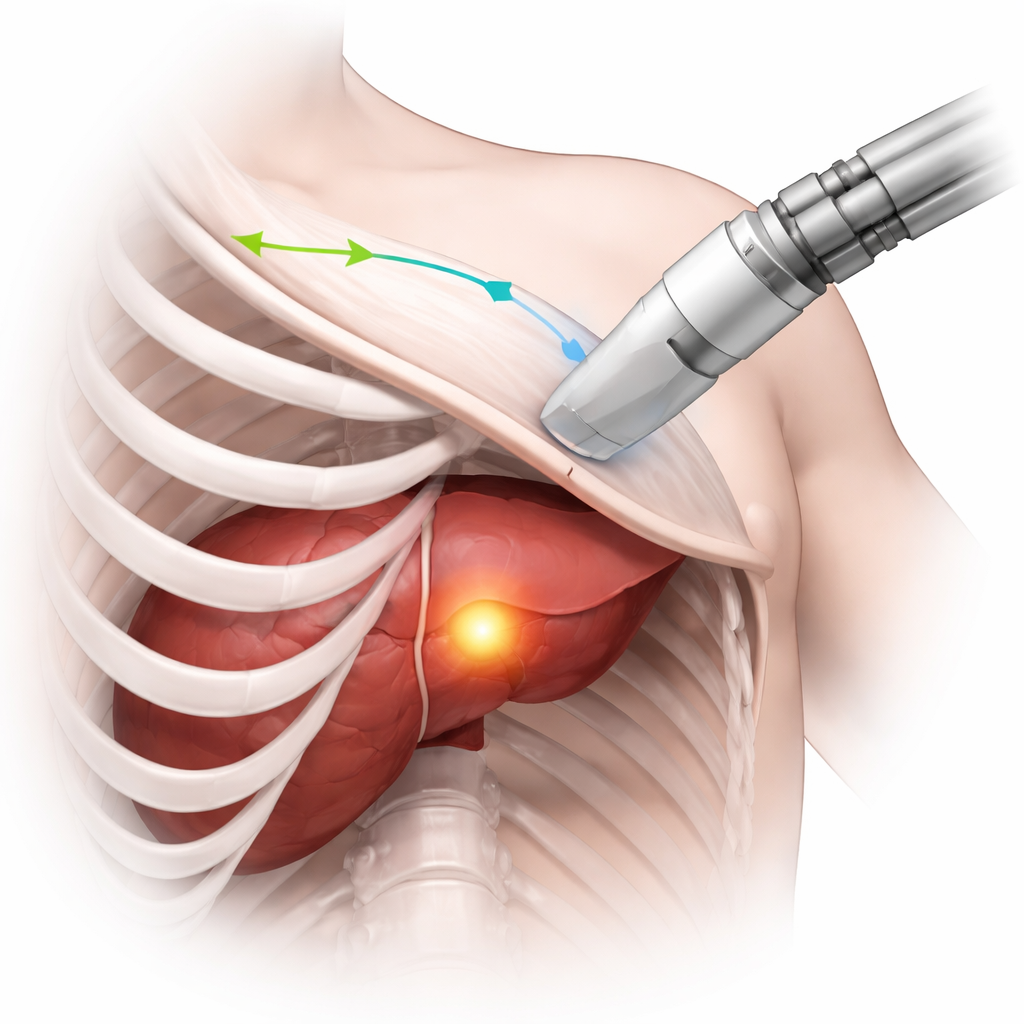
当医生用超声监测肝脏或心脏等器官时,肋骨常常挡在前面,投下遮蔽关键细节的黑影。能否获得清晰视野在很大程度上取决于持探头人员的技巧和经验。这项研究探索了由人工智能引导的机器人,如何自动规划肋间超声扫描路径,以便无论谁操作设备,都能清晰且一致地看到肿瘤和其他目标。
为什么透过肋骨观察如此困难
超声受欢迎的原因在于安全、经济且能提供实时影像。但要对藏在胸廓后方的器官成像,探头必须小心地穿过肋骨之间狭窄的缝隙。如果声波遇到骨骼,就会被阻挡,造成图像中大片黑色区域,无法看到任何东西。人工操作者通过训练和经验学会如何调整角度并移动探头,以避开这些阴影并保持感兴趣区域在视野内。这在诸如肝肿瘤消融等需要反复确认整个肿瘤已被处理的手术中尤其重要。挑战在于把这种精细的三维技能转化为机器人能够独立完成的能力。
用虚拟患者教机器人
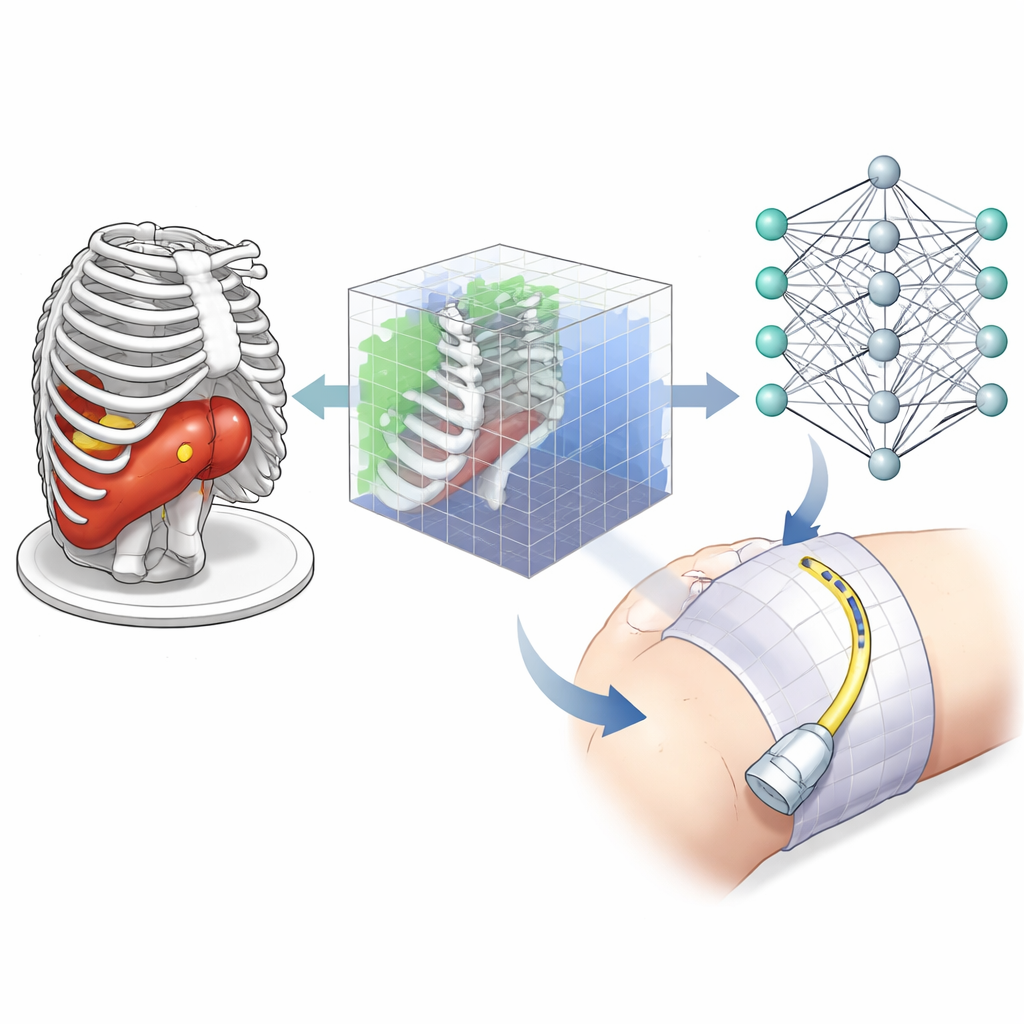
研究者没有直接从嘈杂且变化大的超声图像中学习,而是用计算机断层扫描(CT)建立了虚拟训练场。CT能提供骨骼、皮肤和肝脏的清晰三维图谱,并且可以向其中添加不同形状和位置的肿瘤以生成大量真实场景。在这个模拟器中,虚拟超声探头在覆盖肋骨的皮肤表面移动,超声波束的路径被建模为穿过软组织但被骨骼阻挡的射线。这个简单但现实的模型告诉系统肿瘤的哪些部位可见、声波传播时衰减了多少以及阴影出现的位置。
学习系统如何决定扫描位置
团队使用了一种称为强化学习的人工智能方法,其中一个“智能体”通过试错学习选择能带来更高回报的动作。在每一步,智能体看到一个围绕肿瘤的紧凑三维表示:哪些小体素包含肿瘤、哪些包含骨骼以及哪些被模拟的超声射线穿过。然后它可以以小步幅移动或倾斜虚拟探头,或在用于构建最终三维视图的“探索”模式与“记录”模式之间切换。它收到的奖励结合了三个目标:覆盖尽可能多的目标体积、将探头保持在足够近以减少信号损失的位置,以及避免射线被骨骼阻挡的区域,这些区域会产生无用的阴影图像。
方法的测试
为检验学习到的策略是否能推广到训练样本之外,研究者在智能体从未见过的新CT扫描和新肿瘤形状上进行了测试。在这些试验中,如果在有限步数内至少成像到目标体积的95%,则认为扫描计划成功。在小、中、大三种目标下,该系统的成功率最高可达95%,同时保持了高比例的无阴影视图及探头与肿瘤之间合理的距离。该方法在需要覆盖多个目标(例如肝脏中散在的残余肿瘤斑点)时也有效,尽管随着任务复杂性增加性能自然略有下降。
从模拟到手术室
目前,这项工作侧重于规划路径,而不是实际控制真实机器人的移动。路径是在针对具体患者的CT扫描或可以用现有配准技术随后匹配到个体解剖结构的通用CT“图谱”上生成的。未来,这个规划模块计划与机器人控制、呼吸的运动补偿以及更真实的超声图像模拟结合。对于非专业读者,关键结论是这种方法可以使诸如肝肿瘤治疗等手术过程中超声监测更可靠,不那么依赖操作者的经验,通过让机器人在肋骨间找到聪明且无阴影的通道来保持对整个目标的观测。
引用: Bi, Y., Qian, C., Zhang, Z. et al. Autonomous path planning for intercostal robotic ultrasound imaging using reinforcement learning. Sci Rep 16, 6356 (2026). https://doi.org/10.1038/s41598-026-37702-9
关键词: 机器人超声, 强化学习, 肝肿瘤成像, 肋间扫描, 医用机器人