Clear Sky Science · zh
基于移动激光扫描的道路顶板锚杆/锚索三维点云识别与参数提取
保卫矿井隧道安全
深部地下煤矿依赖钻入巷顶的金属锚杆和锚索来防止围岩坍塌。如果这些支护布置不当或开始失效,工人的生命将面临危险。然而如今,检查成千上万根锚杆仍主要靠人工,在黑暗、有尘的巷道中使用卷尺和量具逐一核查。该研究提出了一种自动化的方法,利用移动激光扫描仪和三维数据“看见”和测量这些隐蔽的生命线,为现代矿井提供更快、更客观的安全检查手段。
对隧道进行三维扫描
研究团队构建了一个专为地下巷道设计的便携式移动激光扫描系统。该设备装有激光测距仪和运动传感器,可由人携带或推行于巷道中,快速向周围岩面发射激光脉冲。随着运动,称为 SLAM(同时定位与建图)的导航技术将接收的测量数据拼接成连续的三维巷道模型。即使在无法接收 GPS 信号的地下,该系统也能以厘米级精度重建 50 米范围的巷道形状,不仅捕捉到岩面,还能记录锚杆、锚索和钢板等支护构件。
清理数字化的巷道
来自矿井的原始三维扫描通常很杂乱。灰尘、水雾、工作人员和机械都会产生杂散点,淆乱数据。团队首先采用两步去噪流程,去除明显的离群点,同时尽可能恢复可能被误删的真实表面。然后他们仅隔离巷道的顶板,因为支护锚杆和锚索都锚固于此。通过数学旋转将数据对齐,使顶板在标准方向上“平放”,这便于统一判断“上”和“下”,并对整个场景中每个支护构件的方向与长度进行一致的测量。
让虚拟布料找到锚杆
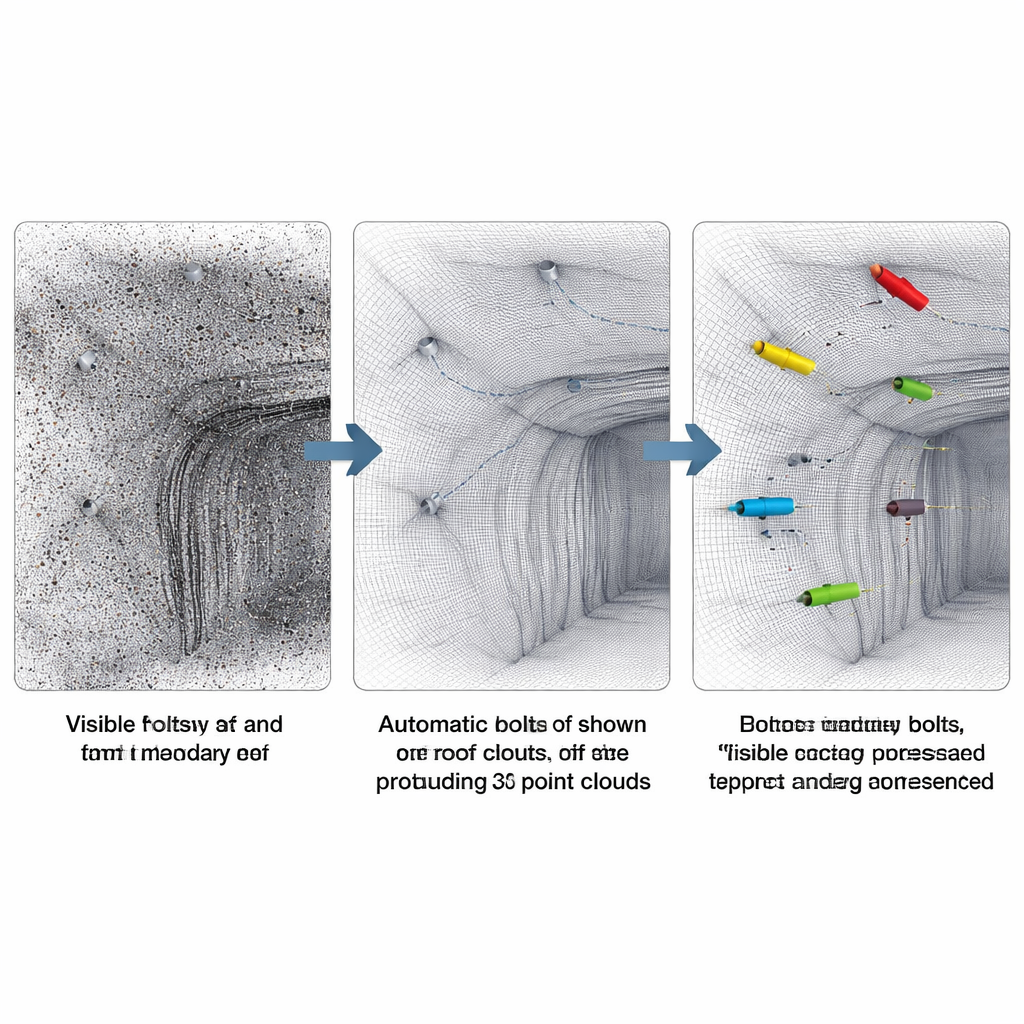
为将顶板表面与附着其上的构件分离,研究人员使用了一种称为布料模拟滤波(Cloth Simulation Filter)的巧妙方法。他们设想一块柔性的布料在重力作用下慢慢贴合颠倒的数字顶板。布料在真实岩面处紧贴表面,而在锚杆、锚索或钢板凸出处则架在其上,留下间隙。通过测量布料表面与实际点云之间的小高度差,算法将点标记为属于平滑岩面或可能的突出物。精心调校的参数使布料既能跟随顶板的自然起伏,又不会过于精细以致“吞噬”它应当揭示的锚杆。
教计算机数数并测量支护
一旦可能的突出物被分离,方法还必须判断哪些点簇是真正的锚杆或锚索,哪些是管道、悬挂电缆或噪声。这里使用基于密度的聚类技术将形成细长形状的相邻点分组。算法会调整搜索半径和最小簇规模,使每根锚杆通常成为一个干净的簇而不与邻近构件合并。对每个簇进行简单的几何分析以找到物体的主轴,并将所有点投影到该主轴上,从而估算裸露长度和倾斜角。基于已知矿井设计的附加规则——例如典型间距、期望直径和允许的安装角度——帮助滤除伪像,仅保留真实且安装合规的支护件。
从三维地图到实用的安全洞察
该方法在内蒙古一处深部煤矿的五段连续顶板上进行了测试,样段含有 127 根由人工仔细标注的锚杆和锚索。自动化系统正确识别了其中 118 根,在灰尘、部分喷射混凝土覆盖和干扰金属零件等挑战条件下,仅有少量漏检和误报。同样重要的是,它为每个支护生成了结构化数据库:精确位置、间距、突出顶板的长度以及相对于岩面的角度。对矿山工程师而言,这把复杂的三维点云转化为便于质量控制和长期健康监测的清单。虽然该方法仍依赖于获得良好的扫描数据并且每根锚杆至少有部分可见,但它指向了一个未来:例行的巷道安全检查可以更快、更频繁,并减少对主观人工判断的依赖。
引用: Ren, Z., Zhu, H., Zhao, L. et al. MLS-based recognition and parameter extraction of roadway roof bolts/cables from 3D point clouds. Sci Rep 16, 6538 (2026). https://doi.org/10.1038/s41598-026-37689-3
关键词: 移动激光扫描, 3D 点云, 锚杆检测, 地下矿山安全, 隧道支护监测