Clear Sky Science · zh
基于B样条路径的BiRRT与元启发式优化的6自由度机器人臂动态质量感知路径规划
平稳且安全移动的机器人
工业机器人现在在与人、工具和输送系统共享的狭窄工作空间中工作。在这些紧张的环境里,机器人手臂不能只是从点A到点B地到达目标;它必须在不发生碰撞、能耗低,并且不会自身或周边设备发生振动或损坏的情况下完成动作。本文描述了一种切实可行的方法,用于为常见的六关节工业机械臂规划此类谨慎运动,将计算机找到的粗略路径转化为平滑、关注能耗的动作,从而能在真实工厂硬件上安全执行。
为什么规划一个简单到达动作出乎意料地困难
当机器人手臂运动时,必须同时平衡许多因素。路径应尽可能短以加快任务完成,能耗应适中以限制热量和磨损,运动应足够平缓以避免手臂发生冲击或振动。传统方法通过少量人工选择的路点绘制平滑的数学曲线(例如样条),这在开放空间中效果良好,但在拥挤工作单元中可能变得低效甚至不安全。较新的采样方法,如快速扩展随机树(RRT),擅长在复杂障碍场中穿行,但往往产生带有尖锐弯折的路径,对电机和齿轮不利。作者认为单一方法不足以应对所有要求;相反,他们将两类方法结合为一个两阶段框架。
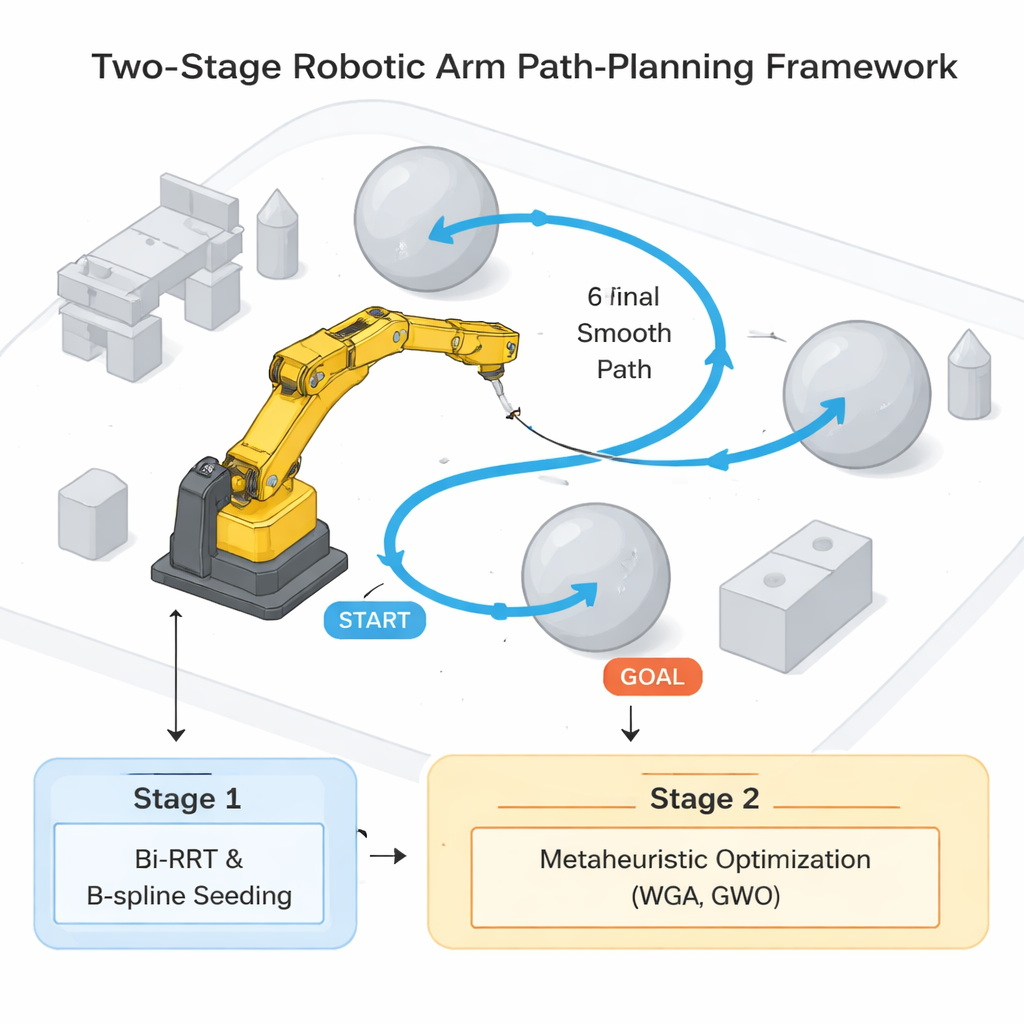
机器人运动的两阶段路线图
在第一阶段,团队在机器人的关节空间中构建一个安全的“参考路线”,而不是仅考虑手末端在空间中的位置。他们从连接起点和目标位置且绕开球形障碍并保留安全间隙的平滑B样条曲线出发。该曲线随后引导双向RRT(Bi-RRT)规划器,后者从起点和目标分别生长两棵随机树,直到它们在无碰撞路径处相遇。在此过程中,整臂的每一次预备运动都会与简化的障碍形状进行碰撞检查。一旦找到一条路径,多余的弯折通过“短路”操作被修剪,结果被重新表达为时间参数化的样条,机器人原则上可以沿其跟随执行。
教机器人更温和地移动
第二阶段将这条可行但不完美的路径进行质量优化。这里,作者使用了两种受自然启发的优化方法:混合鲸鱼—遗传算法(WGA)和灰狼优化器(GWO)。两者均作用于原始样条上的有限控制点和时间参数调节,但它们只能在预先计算的路径安全走廊内移动这些点。每个候选动作由一个单一的综合度量进行评分,该度量融合了三部分:手末端的行程距离、基于各电机特性的关节层能耗,以及关节的“冲击性”——加速度随时间变化的突变程度。通过反复提出、测试和改进候选路径,这些优化器搜索在仍然无碰撞的前提下更平滑、且更易于执行的运动。
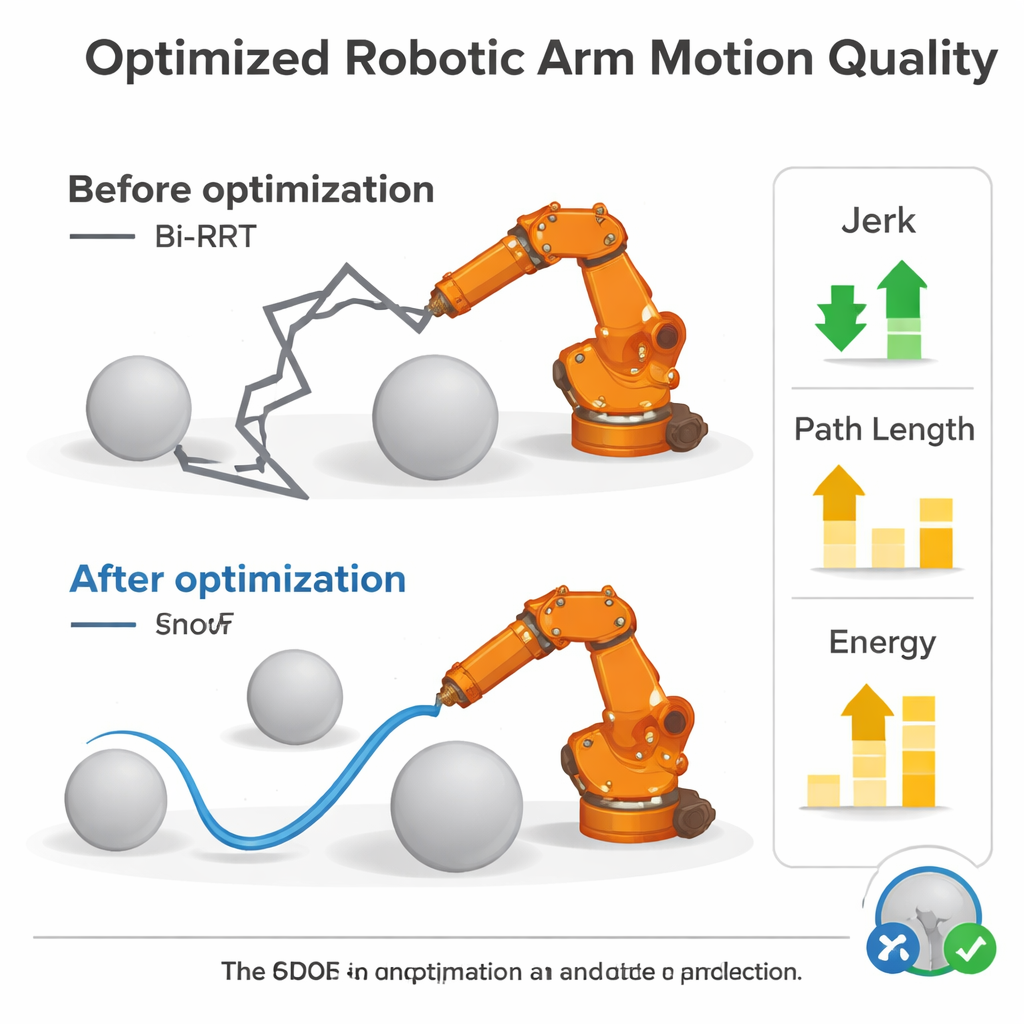
仿真揭示的结果
作者在广泛使用的工业臂KUKA KR 4 R600的数字模型上测试了他们的管线,让其在包含三个障碍的场景中完成固定的两秒运动。纯样条方案已经相当平滑,但并未系统地利用所有可能的安全通路。带短路的Bi-RRT找到的路径在几何长度上相似,并且能耗更低,但有一个主要缺点:其冲击指标——衡量关节加速度变化急剧程度的指标——大约高出十倍,表明该运动很可能在真实机械上激发振动并造成应力。在应用WGA或GWO之后,相对于原始的Bi-RRT路径,冲击大约减少了94–96%。这种显著的平滑化仅以路径距离(约增加15–17%)和能耗(约增加一倍)的小幅增加为代价,作者认为对于真实设备而言这一折中是值得的。
从理论走向车间
对于非专业读者,关键结论是作者提供了一套具体配方——以及基于MATLAB的工具——用于将机器人对如何移动的最初粗略方案转变为优化过的、对硬件友好的运动。他们的方法首先保证在拥挤环境中存在可行路径,然后重塑该路径,使手臂在仍满足所有关节限制和间隙要求的前提下更少地发生冲击。最终结果是一系列真实工业机器人能够更安全、更可靠执行的运动,为未来在机器人与人共享工作空间、并通过摄像头甚至脑电信号接口实时调整动作的扩展奠定了基础。
引用: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
关键词: 机器人路径规划, 工业机器人手臂, 碰撞避免, 运动平顺性, 元启发式优化