Clear Sky Science · zh
认知模型促进对潜在动机的实时推断
为什么猜测隐藏目标很重要
每天,你都会默默地解读周围人的意图——例如司机是否要并道、骑自行车的人会不会停车,或同事是在帮忙还是在竞争。这些瞬间的判断依赖于从可见的动作中推断隐藏的动机。如今的人工智能在预测上可以非常准确,但往往像“黑匣子”一样无法说明为何做出某个决定。本研究探讨心理学上的人类行为模型能否赋予人工智能更类似人类的他人动机感知,使其更迅速、更准确且更容易被信任。
一个简单的追逐与躲避游戏
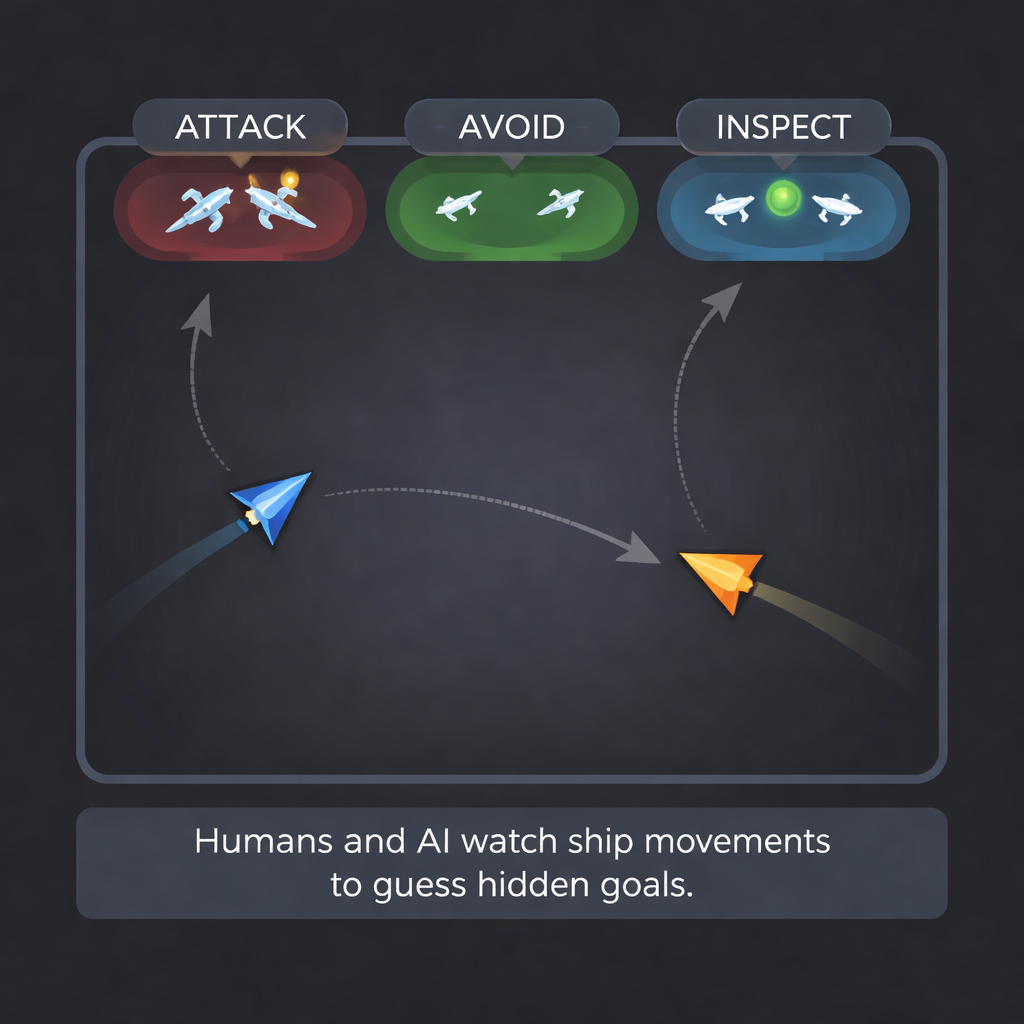
为此,研究人员构建了一个简化的视频游戏。每轮 10 秒钟的游戏中,真人玩家用操纵杆操控一个三角形“飞船”,而一艘电脑控制的飞船按若干模式之一移动。真人在秘密情况下被分配到三种目标之一:攻击(与另一艘飞船相撞)、躲避(保持远离)或观察(保持靠近但不相撞)。电脑飞船可能表现得具有攻击性、羞怯、好奇、防御性或随意游荡。这些组合产生了移动一致或冲突的情形——例如,一个想要攻击的玩家追赶一艘不断试图逃离的羞怯电脑飞船。
衡量人类解读隐藏目标的能力
第一步是弄清人们自身从运动中识别动机的能力有多高。研究团队挑选出表现最好的八名飞船驾驶员的游戏记录,并将每轮游戏剪成短视频。新的志愿者观看这些片段,并在只看到 1、4、7 或 10 秒的运动后,猜测真人玩家的目标——攻击、躲避或观察。在多个组别中,包括有自闭症诊断和无诊断的参与者,人们大约以三分之二的概率正确识别目标。随着观看时长增加,准确率上升,且各组表现相似,为后续比较提供了稳健的人类基准。
描述运动的心理学蓝图
研究者没有把原始视频式数据直接喂给神经网络,而是构建了一个认知模型来捕捉可能驱动人运动的力。其“全局-局部目标追求”(GLOP)模型假设玩家同时在平衡若干吸引与排斥:与对手保持偏好的距离(太近危险,太远又错失机会)、保持在屏幕上的有利位置而不被困在角落,以及匹配或预测对方的速度和方向。这些因素被合成为单一的“动机性”移动方向,并加入额外项以反映人运动的平滑性以及控制中的随机性。

教人工智能从运动中读懂心智
为了使该模型在实时中有用,研究人员用多种 GLOP 参数设置模拟了 100,000 轮游戏。然后训练一个递归神经网络来接收飞船位置序列并快速估计隐藏参数——例如偏好距离或某人对全局位置的重视程度。该网络能仅从几秒钟的运动中非常准确地恢复若干关键参数。接着,他们训练了一组分类器网络以三种不同方式猜测玩家的目标:直接从原始位置数据、从简单的汇总统计(如平均距离和接近与躲避倾向),或从认知模型推断出的参数。最后,他们构建了将这些来源结合起来的“集成”分类器。
超越人类基准
所有人工智能分类器的表现都与或超过了人类,但信息的准备方式很重要。仅依赖原始运动或仅依赖模型参数的网络,其表现与人类相当,约为 66% 的准确率。使用简单汇总统计的分类器表现更好,而将这些统计与认知模型参数结合的结果最佳,达到约 72% 的准确率。这些由模型信息驱动的系统比仅使用原始数据的系统训练得更快、也更稳定。当在每轮游戏中逐时追踪准确率时,人工智能能够在短于屏幕刷新间隔的时间内更新其对玩家隐藏目标的猜测,有效实现实时意图推断。
这对日常人工智能意味着什么
对普通人来说,结论是将心理学理论融入人工智能可以帮助机器理解人们不仅做了什么,还理解他们为何这样做。通过把杂乱的运动转化为一小组可解释的动机——例如某人想要保持的接近程度或他们如何在安全与机会之间权衡——系统既更准确,也更易解释。在未来的应用中如自动驾驶汽车或人机协作团队,这类“认知前端”可以帮助人工智能更早更可靠地预判其他主体的意图,可能避免碰撞和误解,同时提供人性化的解释,例如“另一位驾驶者很可能在尝试并道,而不是仅仅偏离车道。”
引用: Fitch, A.K., Kvam, P.D. Cognitive models facilitate real-time inference of latent motives. Sci Rep 16, 6444 (2026). https://doi.org/10.1038/s41598-026-37587-8
关键词: 心智理论, 认知建模, 意图推断, 人机交互, 可解释的人工智能