Clear Sky Science · zh
老年人使用助行器行走的步态适应:时空与运动学参数的主成分分析
为何使用智能助行器的行走很重要
随着年龄增长,行走常变得更慢且不稳,增加了跌倒、骨折和失去独立性的风险。许多老年人使用助行器以保持活动能力,但这些装置也会微妙地改变他们的移动方式——有时是以尚未充分理解的方式。本研究探索了一款高科技“智能助行器”如何改变健康老年人的步态,采用精细的运动测量与先进统计方法,试图区分哪些变化来源于衰老本身,哪些是由设备引起。
衰老与行走支具之间的关联
跌倒是晚年健康的一大问题,大约三分之一的65岁以上人群每年会至少跌倒一次。为降低该风险,临床医生常建议使用助行器。然而,常规助行器有时难以操控,如果使用不当甚至会增加摇晃感。工程师开始研发带有传感器、电机与控制系统的智能助行器,以提供更平顺的支持与引导。在将此类设备广泛用于中风或帕金森等患者之前,研究人员需要弄清它们如何改变原本健康老年人的行走方式。这一“清晰”的基线有助于日后判断患者是在改善、代偿,还是养成了潜在不利的新运动习惯。
深入观察智能助行器辅助下的行走
研究团队招募了14名中旬60岁的老年志愿者,这些人没有行走障碍。每位受试者完成两次简单的10米步行:一次不使用任何装置,另一次使用名为UFES vWalker的智能助行器。这款机器人助行器配有力传感器、激光扫描仪与由软件控制的车轮,能将使用者推力转换为最高0.4米/秒的安全低速。在行走过程中,佩戴于骨盆、大腿、小腿与足部的小型传感器组成的可穿戴动作捕捉服记录了他们的行走速度、每步所用时间、步幅宽度以及髋、膝、踝关节在步态周期中的运动情况。
使用助行器时出现的变化
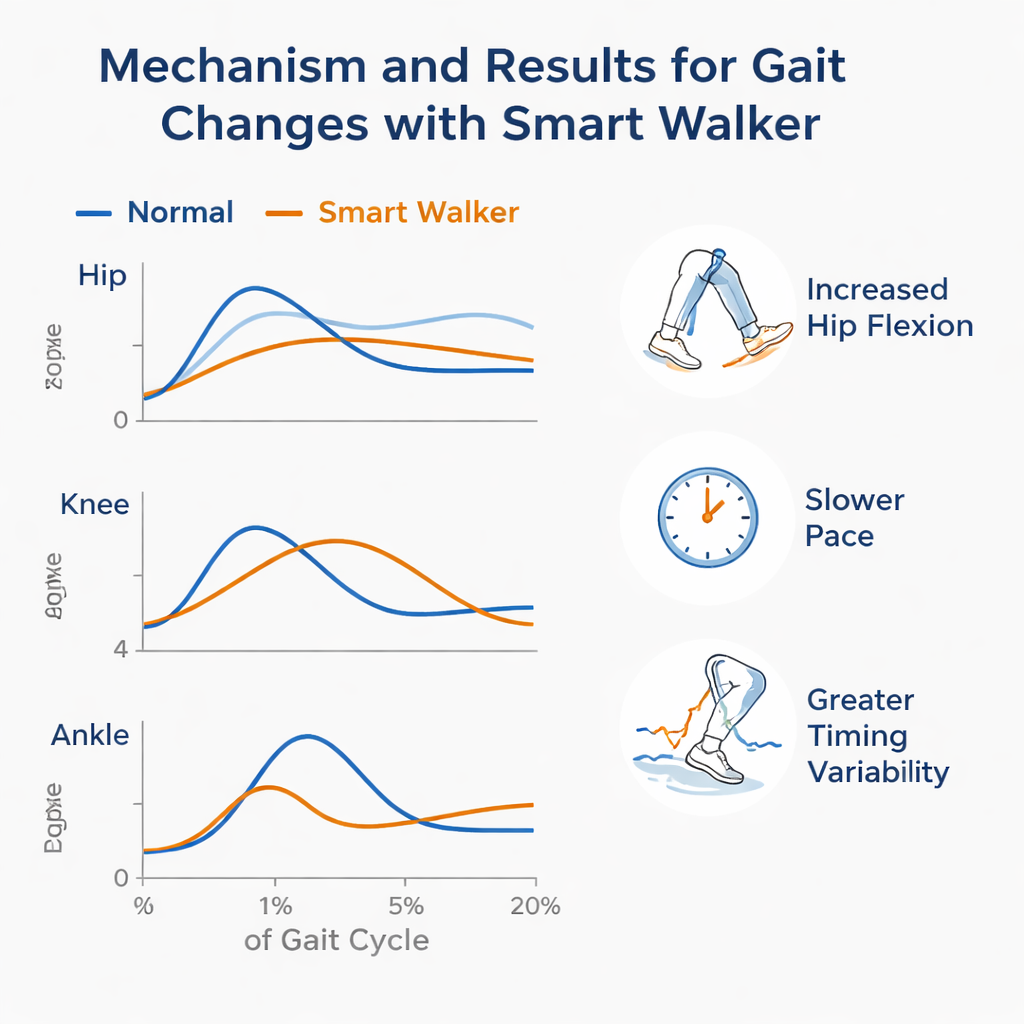
使用智能助行器时,受试者行走更慢,步长更短且略窄,双足着地的时间增加。步与步之间的时间也变得更具变异性。关节角度亦发生改变:髋部在整个步行过程保持更屈曲的“前倾”姿势,而摆动相期间膝关节的屈曲倾向减少。许多踝关节和髋关节运动幅度增加,反映出人们为握住前臂支撑而采取的驼背式姿势。这些变化并非随机。研究者使用一种称为主成分分析的统计技术,将相关测量归为更广泛的“领域”,如步速、节律、对称性、支撑基底和关节运动。正常行走显示出与既有老化研究相似的明确领域,而助行器辅助行走则产生不同的模式,包括与腿摆动及在部分体重由设备支撑时步态产生方式特别相关的新领域。
步态中的隐藏模式
通过将标准的逐步测量与关节运动数据结合,分析揭示了行走不同部分如何协同。在正常行走中,步速与变异性构成一个关键领域,而节律、对称性与支撑基底构成其他领域;加入关节角度则把髋、膝、踝的不同运动模式区分开来。然而在智能助行器下,早期站立相的膝踝运动与行走速度紧密相关,而摆腿时的髋膝运动与左右步之间的差异相关。另一个新的领域“步态动力学”捕捉到了步长、时序差异与踝部蹬推在使用助行器时如何相互作用。这些设备特有的领域表明,智能助行器不仅仅是稳定使用者——它还主动重塑双腿协调产生每一步的方式。
这对老年人更安全行走意味着什么
对于非专业读者,关键信息是:智能助行器可以使行走变得更慢且更可控,但它们也会促成前倾姿势以及与正常行走不同的步时和腿部运动模式。这些由设备驱动的改变并不必然有害;短期内它们可能让人感觉更安全。但如果康复计划在缺乏谨慎调整的情况下长期依赖智能助行器,使用者可能会“学会”一种日后难以改掉的行走方式。作者认为治疗师和设计者应利用这些发现微调支撑强度、把手高度和训练目标,使智能助行器成为通向更安全、更自然行走的过渡工具——而非将新的、更低效的习惯固化为长期的拐杖。
引用: Elias, A., Loureiro, M., Machado, F. et al. Gait adaptations to walker-assisted locomotion in elderly: a principal component analysis of spatiotemporal and kinematic parameters. Sci Rep 16, 6872 (2026). https://doi.org/10.1038/s41598-026-37448-4
关键词: 智能助行器, 老年步态, 防跌倒, 康复机器人学, 可穿戴运动传感器