Clear Sky Science · zh
在拥挤环境中异构 UAV–UGV 团队的安全编队缩放与运动规划
在空中与地面协作的机器人
想象一群小型飞行无人机在灾区上空侦察,而结实的地面车辆在下方瓦砾中穿行,整个队伍作为一个协调单位一起移动。本文探索如何在狭窄、障碍密布的空间内保持这种混合机器人编队同行,避免碰撞或频繁的重新规划。作者提出了一种新的方法,使空中与地面机器人共享稳定编队,穿过狭窄缝隙并能快速且安全地到达目标。
为何混合机器人队伍难以协调
飞行无人机和轮式地面车辆的运动特性大不相同。无人机在三维空间中敏捷穿梭,易受风力等外界扰动影响;地面车辆则需遵守转向限制并应对崎岖地形。然而,许多实际任务——从搜救到基础设施检测——若能让这些机器人作为单一三维整体一起行动,将大有裨益。现有方法常把保持编队与避障视为两个分离的问题。当环境变得拥挤时,编队往往会被打散然后再重组,浪费时间并增加碰撞风险。
一种保持队伍完整的新方法
为了解决这一问题,作者设计了一个称为 RG–ASAPF 的框架,将编队形状与运动紧密耦合。其核心是把编队用一种“刚性”结构的数学描述来表达:通过选择机器人之间的期望距离,使得整体形状被唯一确定,类似于稳定的三维支架的杆件。随后每个机器人使用一条共享规则来调整自身运动,以恢复并维持这些距离,即便在编队移动和转向时亦是如此。这一规则被设计为同时适用于飞行与行驶机器人,并能在线适应诸如未建模摩擦或小幅外力推挤等不确定性。
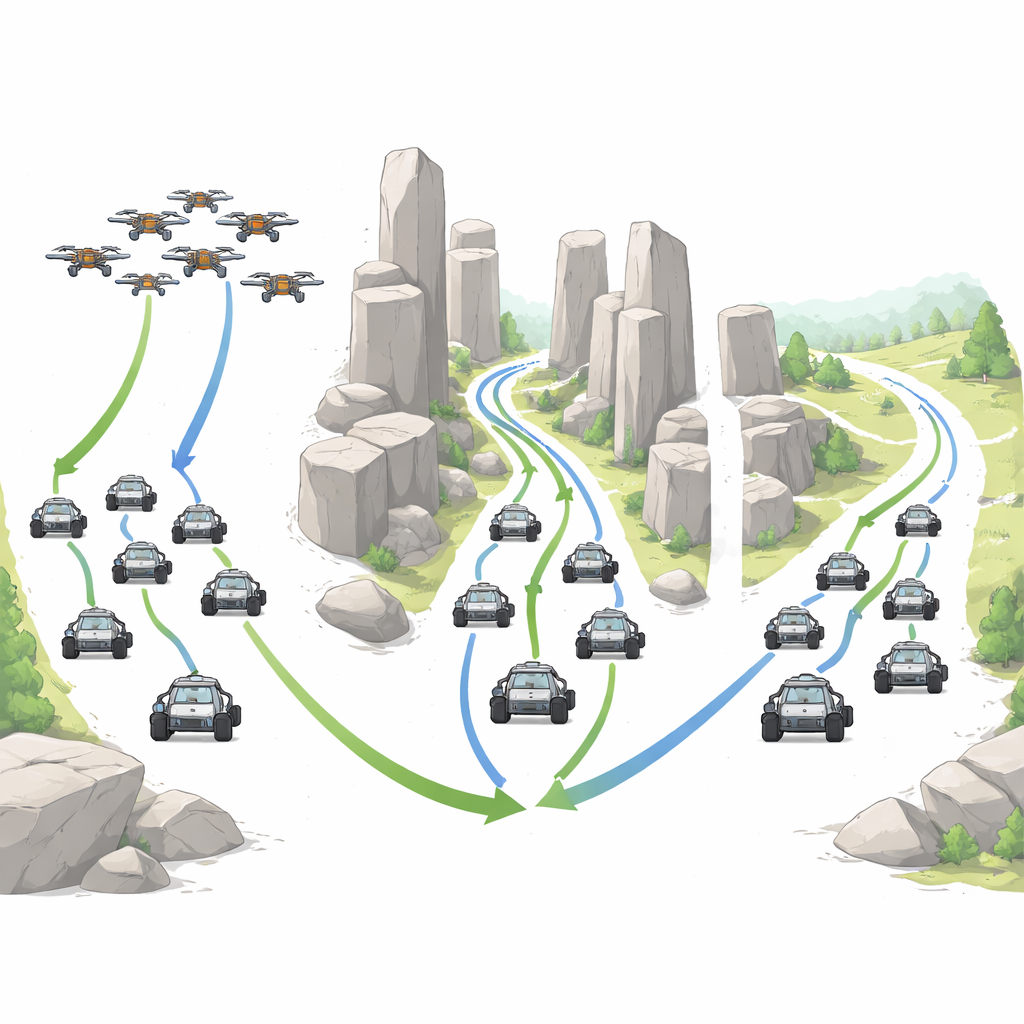
让编队在狭窄处“呼吸”
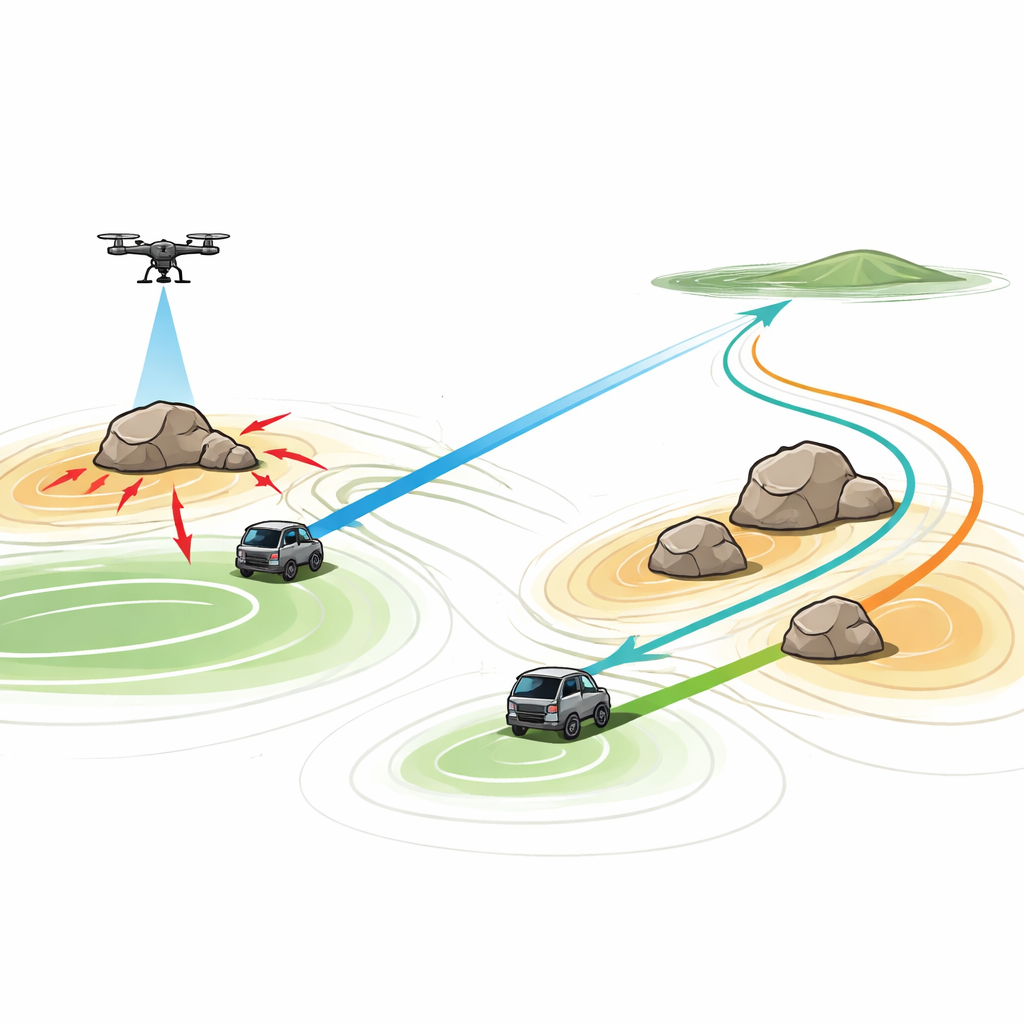
真实环境很少是空旷地;它们充斥着建筑、树木、车辆和移动物体。在开阔空间内安全的编队可能太大而无法通过狭窄巷道或密集障碍簇。所提出的方法允许编队平滑地缩放——整体尺寸缩小或扩大——同时保留其基本结构。团队引入了一辆领导地面车辆,使用人工势场来规划路径,其中目标充当吸引器而障碍对编队产生排斥。与传统势场可能陷入死角或导致抖动不同,他们的“自适应安全”版本持续调整障碍排斥的强度,使机器人保持安全距离而不会过于谨慎或被困住。
在拥堵与运动中寻找更聪明的路径
该势场进一步被改进,使得吸引与排斥构成的整体“地形”始终在目标处具有最低点。这有助于防止编队被卡在障碍之间的尴尬位置。排斥效应的强度通过一种借鉴自早期神经网络训练的简单学习规则进行在线调整:当机器人靠近障碍时,排斥自动增强;当有充足间隙时,则放松。如果环境紧到即便缩小编队也无法安全通过,该方法会启用后备机制:团队短暂停止,虚拟放大一条安全通道,并在绕开问题区域后重新规划更安全的路线再继续前进。
在虚拟世界中的测试
为了验证方法的效果,作者进行了大量混合无人机与地面车辆的计算机仿真实验。他们测试了仅有少量障碍的开阔区域、障碍众多的密集迷宫、包含移动障碍的场景,以及必须变换为更复杂三维形状(例如六角柱)的编队。在所有这些情况下,编队在三维空间内保持完整,安全地避开静态和移动障碍,并在需要时调整其尺寸。机器人沿着平滑、高效的路径行进,而不是在障碍周围曲折绕行。与几种流行的规划方法比较——包括经典与改进的势场、粒子群优化、以及线性和非线性模型预测控制——该新方法通常能找到更短、更平滑且能耗更低的路径,同时比基于重优化的技术更快地计算出路径。
对现实任务的意义
对非专业读者而言,关键信息是:论文展示了如何使飞行与地面混合团队像单个灵活的机体一样通过拥挤的三维空间。与其在遇到障碍时拆散编队,团队可以在保持一致性与安全的同时弯曲、缩小并重定向。这可望在灾害响应、工业检查和安全巡逻中带来更快、更可靠的机器人支持。尽管当前工作在仿真中展示并依赖于指定的领导车辆,作者也概述了朝向更具容错性的团队与真实世界实验的未来步骤,使空地紧密协同的机器人群体向实践更进一步。
引用: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
关键词: 多机器人编队, 无人机与地面车辆协作, 避障, 运动规划, 群体机器人学