Clear Sky Science · zh
一种具备无级臂长参数化和自适应力触发阻抗融合的上肢远程操控外骨骼
在安全距离内实现更安全的近距离操作
地球上——甚至在太空中——许多最危险的工作仍需要人的判断力与灵巧度。想想修复受损的核设施、处理爆炸物或稳定航天器。本研究介绍了一种新型动力化上肢外骨骼,能够让佩戴者像控制自己的手臂一样操控远端机器人臂,同时保持远离危险。该装置着重于让机器人动作并“感受”如同人体的自然延伸,且能适应不同的臂长以及环境中变化的力。
为什么远程机械臂很重要
机器人已经在水下、灾区和反应堆内工作,但大多数要么是预编程的,要么通过简单操纵杆引导。当情况突变时,这些方式的能力就受限了。远程操控系统——由人实时控制远端机器人——提供了一条中间路径,将人的决策力与机器人力量和作业半径结合起来。早期系统可以移动工具,但通常缺乏精确的力反馈,也难以适应不同用户的体型。结果是动作笨拙、“手感”差,并对操作者与机器都造成额外负担。
真正合身的可穿戴机器人臂
该团队构建了一款可穿戴的上肢外骨骼,具有与肩、肘、腕对齐的七个动力关节。碳纤维与铝等轻质材料使装置保持灵敏而非沉重迟钝。一项重要创新是外骨骼的上臂与前臂长度可以平滑调节,而不是仅有几个固定档位。带有内置电气传感器的滑动导轨持续测量佩戴者的真实臂长,并将该信息输入数字人体模型。因此,装置会自动将其内部几何形态重塑以适配个体,提高舒适性,并使机器人动作更忠实于人体意图。 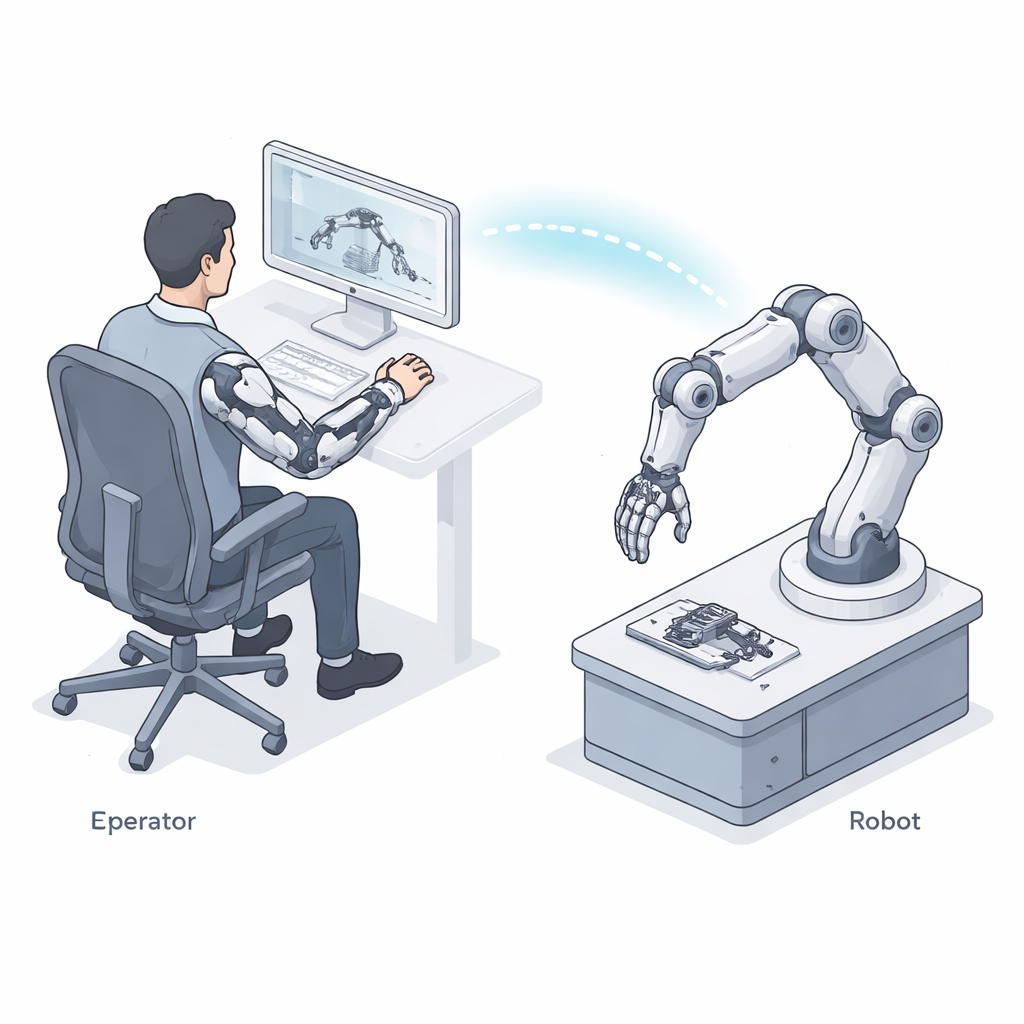
随身体运动,而非与之对抗
人的肩部不仅像铰链旋转;肩胛骨也会在肋骨上滑动。许多外骨骼忽视了这一点,最终与自然运动相抗,导致不适。该设计添加了一个被动模块,具备若干额外自由度,静默地跟随肩部与上身的细微位移,减轻对皮肤和关节的压迫。同时,动力关节经过调校,使其扭矩——旋转力矩——保持在人类组织的安全限度之下。紧急停止与卡阻检测器补全了安全特性,使系统在出现异常时能迅速响应。
更智能的接触感知方式
除了机械结构,作者还关注佩戴者的感受。当远端机器人触碰或抵住某物——墙面、工具把手或其他物体——这些力会通过外骨骼反馈回来,使用户能感知到阻力。控制系统融合了两种通常冲突的需求:对操作者动作的精确跟踪和在接触力增大时的温和、顺应性行为。在低力情况下,系统表现得僵硬且精确,紧跟佩戴者的臂路。当力超过安全阈值时,控制会自动软化,允许一定回弹,从而缓冲冲击而非造成震荡。作者使用基于能量的数学工具证明了这种融合行为是稳定的,而不会演变成振荡。 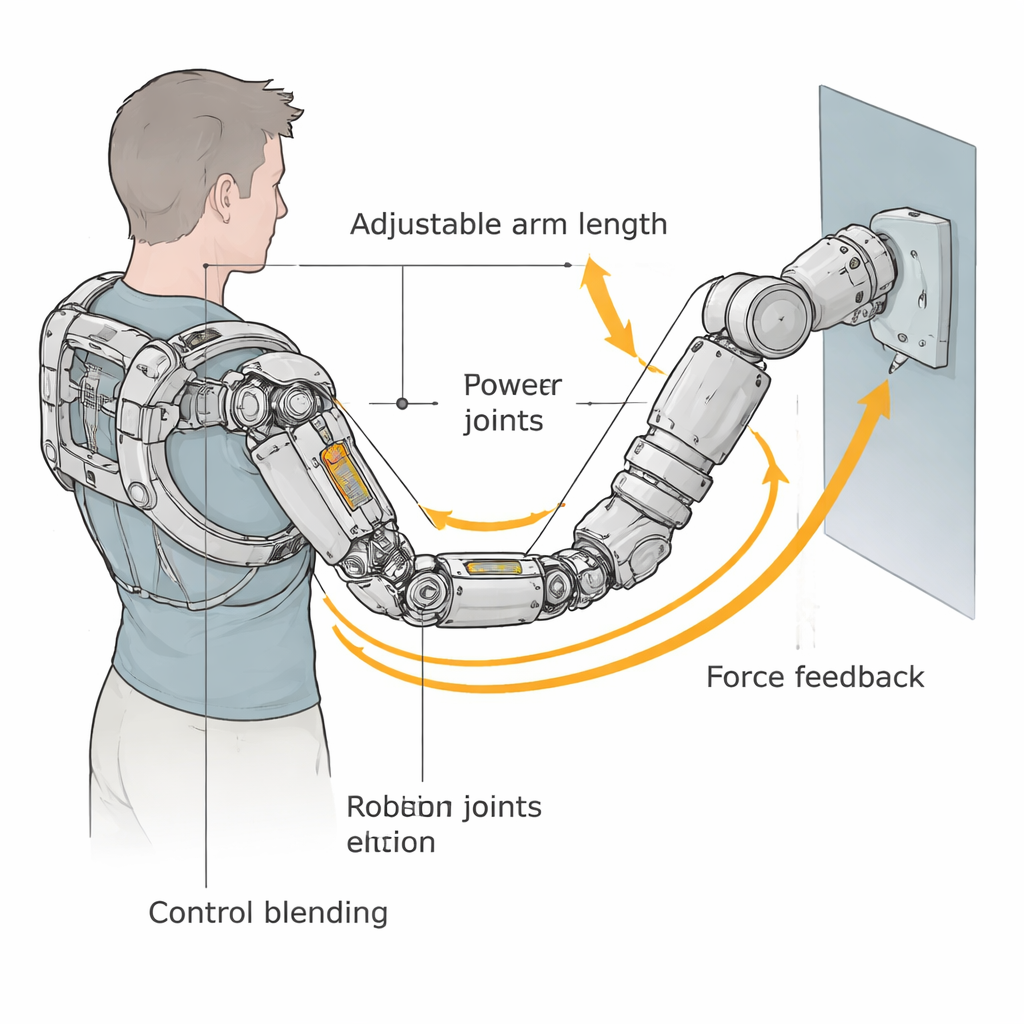
将系统付诸测试
为了评估外骨骼,研究人员将其连接到一款广泛使用的工业机械臂。当佩戴外骨骼的人在空中描绘八字轨迹时,远端机器人在小幅通信延迟下仍能近似重现该运动。附加测试检验了臂长感测的效果:滑动传感器的电压读数与实际物理测量的误差在几毫米以内,即便在反复穿戴与脱卸后亦是如此。在受控仿真中,当机器人压向虚拟刚性墙面时,完整的控制方案将峰值接触力相比基本配置降低了近70%,同时在自由运动下大体保留了跟踪精度。
对现实工作与护理的意义
用通俗的话说,这项研究让我们更接近于一种远端机器人,其操控感觉和安全性如同移动自己手臂一般自然。通过结合贴合身体的可调框架、对人体运动的精细跟踪以及能随时自适应的智能力反馈,系统有望在危险环境中提供更精确且不易疲劳的远程操控。相同技术也可用于中风康复患者,使治疗师在引导并记录臂部运动的同时,让患者获得逼真的辅助与反馈。随着未来版本整合肌电与视线等信号并通过经验学习,这类外骨骼—机器人配对可能成为既能胜任极端任务又适用于日常康复的多面手工具。
引用: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
关键词: 远程操控外骨骼, 机械臂控制, 力反馈, 康复机器人学, 远程危险作业