Clear Sky Science · zh
使用扩展卡尔曼滤波器对动态能量存储充电机器人电池荷电状态的实时估计及自主充电策略
更智能的机器人电池为何重要
从仓库配送机器人到巡检机器人,移动机器人的实用性受限于电池表现。如果机器人错误估计剩余能量,可能会在远离充电桩的地方停摆,打断工作并有损电池。本文提出了一种新方法,使机器人能实时“知道”其真实电量,并能在合适的时机和方式为自身充电,从而延长工作时间、提高安全性并减少人工干预。

繁忙任务下受压的电池与机器人
与在高速公路上平稳行驶的电动汽车不同,许多移动机器人频繁经历急起、急停和负载突变。这些冲击导致电池电流与电压剧烈波动,使传统的剩余电量估算方法混淆不清。仅读取电压或简单累积电流的做法通常假设工况平稳,且无法跟踪电池老化或发热的影响。结果是估计会漂移、误差累积,机器人要么过于频繁充电,要么过度消耗电池,缩短电池寿命。
更贴近电池内部行为的模型
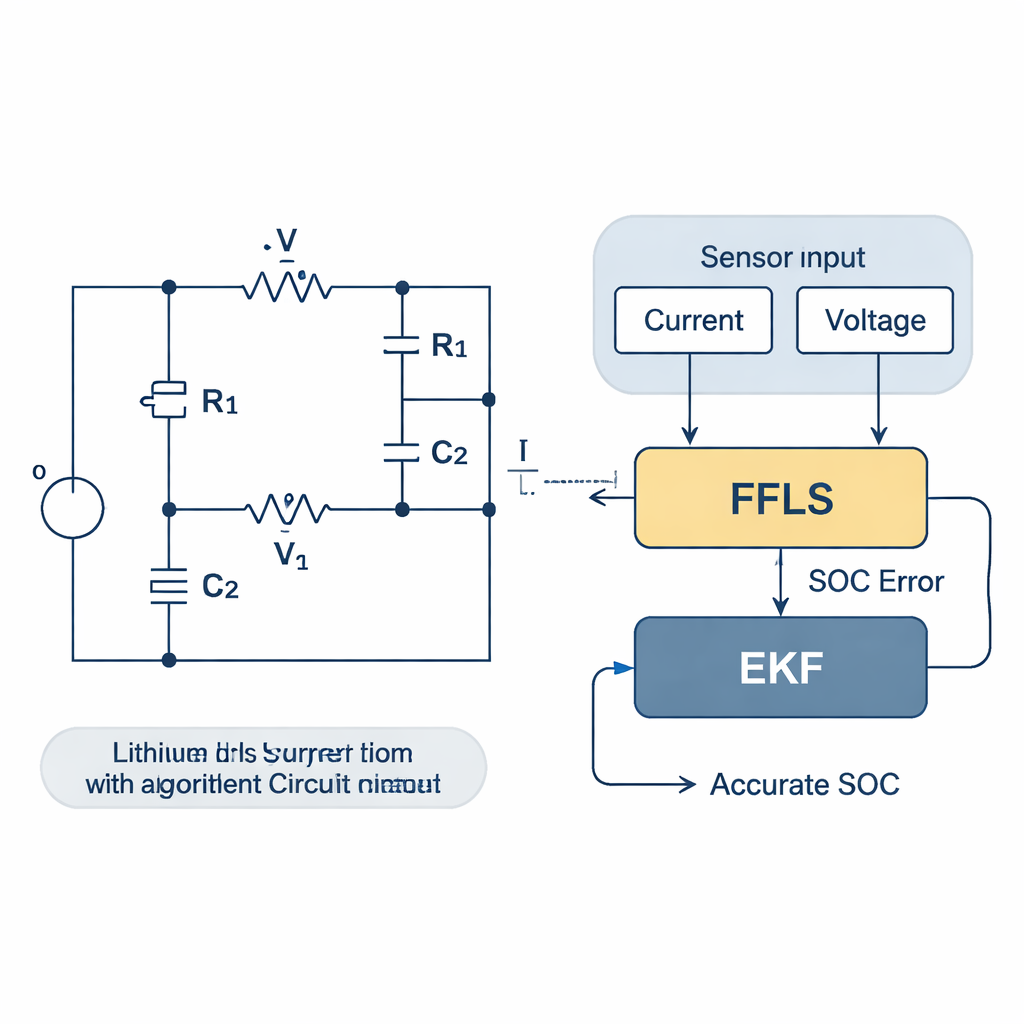
作者通过为机器人提供更真实的磷酸铁锂电池模型来应对这一问题。他们不再把电池视作单一电压的黑箱,而是用带有内部电阻和两个“极化”支路的电路网络来描述,模拟离子在电池内部的迁移与累积。这个二阶RC模型能捕捉到负载变化时的快响应与慢响应。机器人持续测量电流与电压,并使用带有“遗忘因子”的最小二乘法将这些信号拟合到模型中——这是一种在条件变化时更重视近期数据并淡化过往历史的数学手段。
让算法在线学习与自适应
在该模型基础上,团队应用了扩展卡尔曼滤波器,这是一个用于在噪声数据中追踪隐含状态的广泛工具。此处的隐含状态就是电池的真实荷电状态。随着机器人运行,滤波器根据模型和测得电流预测荷电变化,然后用测得电压修正该预测。带遗忘因子的最小二乘模块持续在线更新关键模型参数,因此滤波器不会依赖过时的出厂标定电池描述。研究者还巧妙地利用了内阻与称为极化电容的量之间的关联:随着温度上升,内阻下降而电容增大。通过同时观察两者,系统可以在没有物理温度传感器的情况下推断温度效应并相应调整模型。
教会机器人何时以及如何充电
准确的电量估计只是故事的一半;另一半是机器人如何利用这些估计。作者设计了一种自主充电策略,避免持续“补电”和深度放电。他们定义了上限和下限:当电池低于某一阈值时,机器人优先返回充电座;若接近上限,则延后充电并继续工作。在安全范围内,机器人会在空闲时段充电。系统还监控电池包中的每个单体电芯并平衡它们的电量,防止某些电芯过充而其他电芯滞后,这是防止早期老化的关键。为提高对接效率,机器人将室内导航与短距红外引导结合,缩短路径和对接时间。
更持久、更可靠的机器人电源
在使用公开电池数据集、仿真和真实机器人进行的测试中,该方法对荷电状态的估计准确度约为98%,明显优于基于粒子滤波、神经网络和Transformer等若干先进替代方法。采用该方法管理的电池在数周的模拟使用中保持电量更好,并在充放电循环寿命上比对手方法多存活15–40%。内阻增长更慢,表明电芯更健康,机器人维持更高电池健康水平的同时在充电座停留的时间更少。对非专业读者来说,结论是该技术使机器人能更好地“照顾”自己的电池:它们能更准确判断能量、选择更聪明的充电时刻,并在无需额外传感器或大量计算资源的情况下悄然延长昂贵电池包的使用寿命。
引用: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
关键词: 移动机器人, 电池荷电状态, 自主充电, 扩展卡尔曼滤波器, 磷酸铁锂电池