Clear Sky Science · zh
考虑负载的运动剖面用于多AGV系统调度的动态链
为什么仓库机器人需要更好的时序
在线购物使仓库堆满了需要快速、安全、全天候搬运的货物。许多设施现在依赖地面巡航的机器人——自动导引车(AGV)——来搬运货架和托盘。但如果这些机器人基于对其运动的过于简化的假设来安排,就可能浪费时间、震动易碎包裹,甚至增加碰撞风险。本文提出了一种新的方法,通过考虑机器人的真实物理行为来同时规划和协调大量AGV,有望在繁忙仓库中实现更顺畅的交通和更安全的货物搬运。
搬运货物的机器人,而不仅是移动时间
现代AGV已经在仓库、机场和工厂中穿梭,拖运小车或提升货架与托盘。大多数现有的车队管理软件工作在高层:决定哪个机器人执行哪个任务以及大致走哪条路线。为了简化计算,它通常假定两点之间的行驶时间是固定的,忽略了机器人实际能如何加速或减速、以及负载重量的影响。作者表明,这种简化在真实建筑中会造成问题。机器人可能在路口提前或延后到达,增加拥堵、险些相撞或突然制动的概率,从而摇晃所载货物。
将真实物理引入调度
研究人员以两阶段方法弥合了这一差距,将物理模型与调度结合。首先,他们设计了用于AGV的动态旅行时间估计器,称为DTT-AGV。DTT-AGV并不把走廊视为单一时间块,而是将每次移动拆分为多个阶段:加速、匀速巡航和减速。它采用了一个简单的机械模型来刻画载货AGV,其中货架被视为通过弹簧和阻尼器连接的质块。该模型捕捉了加速与减速如何引起货物摆动或振动。基于此,算法计算在不超过速度、力或振动限制的前提下,车辆在给定距离和负载下能安全行驶的最大速度,并为路径的每一段返回现实的行驶时间。
防止机器人迎面相遇
其次,团队引入了一种到达时间链方法,ATC-AGV,用以协调共用路径上的多台机器人。在DTT-AGV估计出每段所需时间后,ATC-AGV在每个节点——交叉口、转弯或换乘点——上为每条机器人路线指定精确的到达与离开时间。它在每个共享节点构建时间“链”,确保车辆之间保持安全间隔,同时考虑当前机器人状态,例如是否载货、是否在充电或是否正在转弯。如果新计划会导致两台AGV在时间上过于接近同占一节点,ATC-AGV会将其中一台机器人的时间表微调到足以恢复安全边界。实际上,它将仓库的地面网格变成一个具备时间意识的地图,帮助在碰撞发生前加以防范。
测试更平滑的运动与更温和的乘载体验
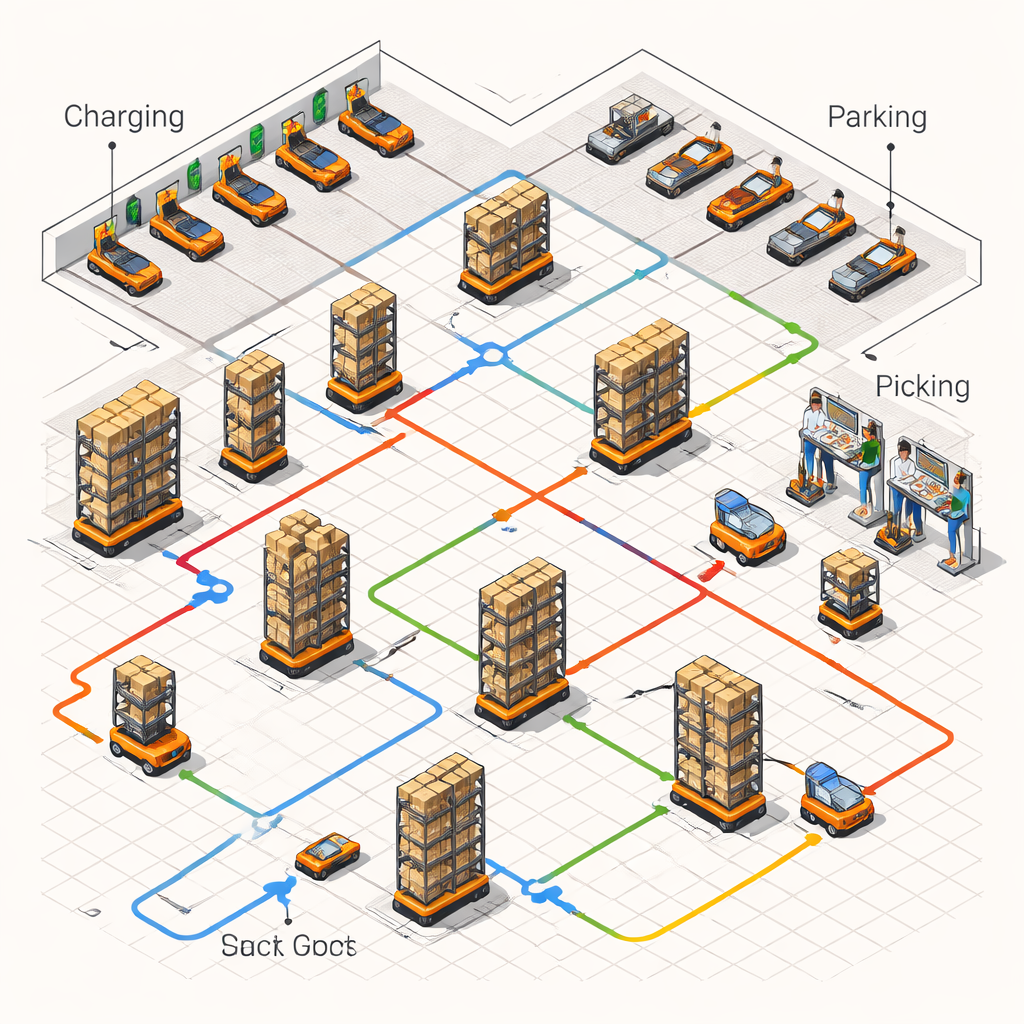
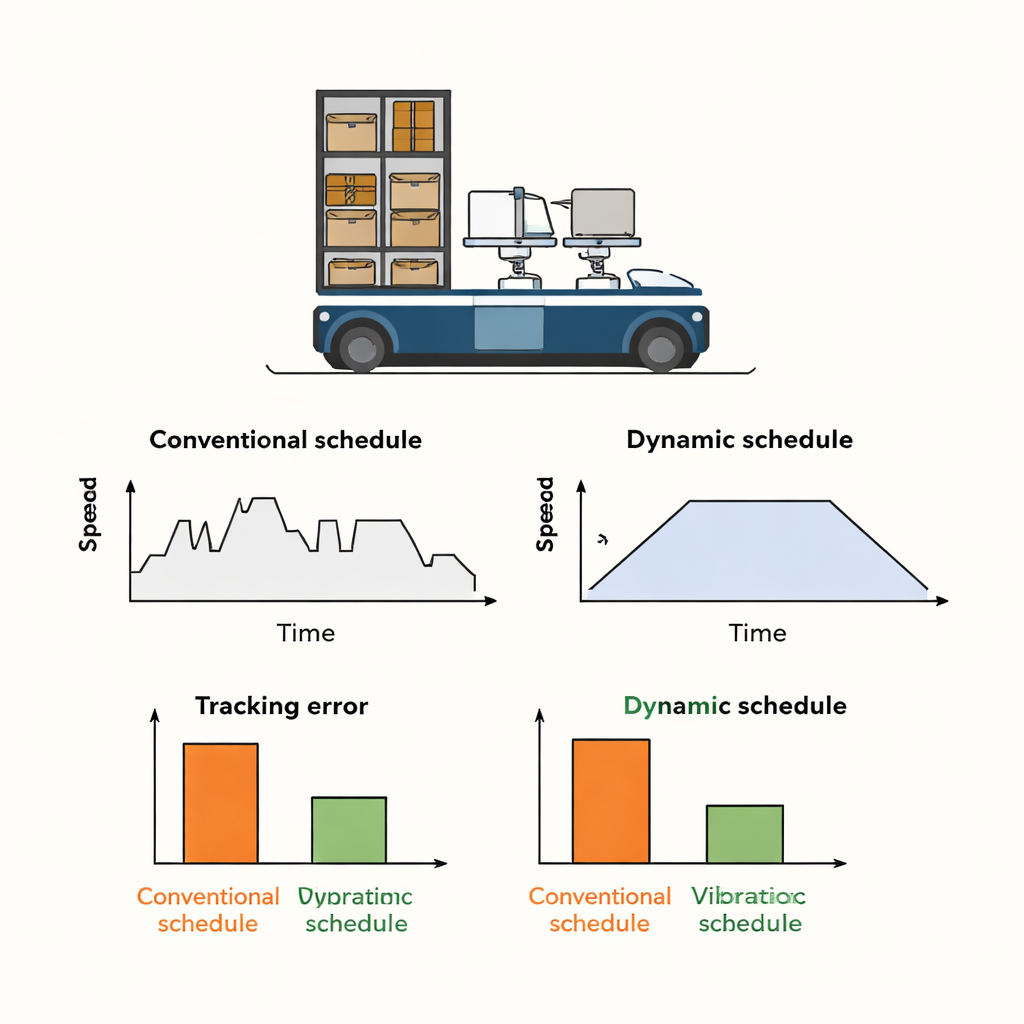
为了验证想法,作者在一个格栅式交叉对接仓库中模拟AGV,该仓库包含充电区、停车位和货架区。他们将自己的规划器与一种假定速度近似恒定并忽略详细运动阶段的传统方法进行比较。在一项测试中,一台机器人沿L形路径行驶并转90度。传统方法在拐角处产生了剧烈的速度变化,而真实机器人无法完美跟随,这导致大的跟踪误差——机器人应在的位置与实际位置的差异——以及关键点上的时间误差尖峰。使用新规划器后,路径被清晰地拆分为加速、巡航和制动阶段。仿真机器人更能紧贴目标路径,误差显著减小,转弯更为平滑。
对包裹更温和且面向未来
第二组测试关注负载本身的表现。使用传统调度时,机器人底盘会遭受突发的加速度冲击,激发货架的弹簧式行为,从而引起货物强烈振动。采用动态的、考虑负载的调度后,加速度维持在更窄的范围内且变化更为温和。随着时间测量,货物的峰值和平均振动均大幅下降,这对易碎、堆叠或不稳定物品至关重要。作者还探讨了诸如车轮与地面摩擦等被忽略的因素可能如何影响他们的估算,发现于典型仓库条件下,新增的时间误差仍在算法内置的安全缓冲范围内。
这对实际仓库意味着什么
简而言之,这项工作教会AGV调度系统尊重其所控制机器的真实运动。通过基于机器人真实的加速、减速能力以及不同负载下能否保持不致振荡来确定行驶时间与通行权,所提出的框架降低了路径跟随误差、减弱了货物振动并减少了路口冲突风险。对仓库运营商和制造商而言,这意味着更顺畅的车流、更安全的货物处理,以及在车队规模扩大和布局更复杂时仍可扩展的基础。
引用: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
关键词: 自动导引车, 仓储机器人, 无碰撞调度, 运动规划, 智能物流