Clear Sky Science · zh
在存在不确定性的情况下,使用自适应二阶连续控制实现四旋翼停靠
为何让无人机贴墙很重要
想象一种小型无人机,它不仅仅是在空中悬停直到电池耗尽,而是能像鸟儿一样悄然着落在墙面上,然后静静停驻数小时,监视桥梁、农田或林缘。本文提出了一种新的控制方法,使这种“停靠”无人机能够飞向垂直表面、接触时不反弹,并在空气紊流或无人机动力学不完全已知的情况下仍能稳定附着。该工作旨在将脆弱的飞行器转变为可靠且省能的巡检工具。
从盘旋机器人到贴墙侦察机
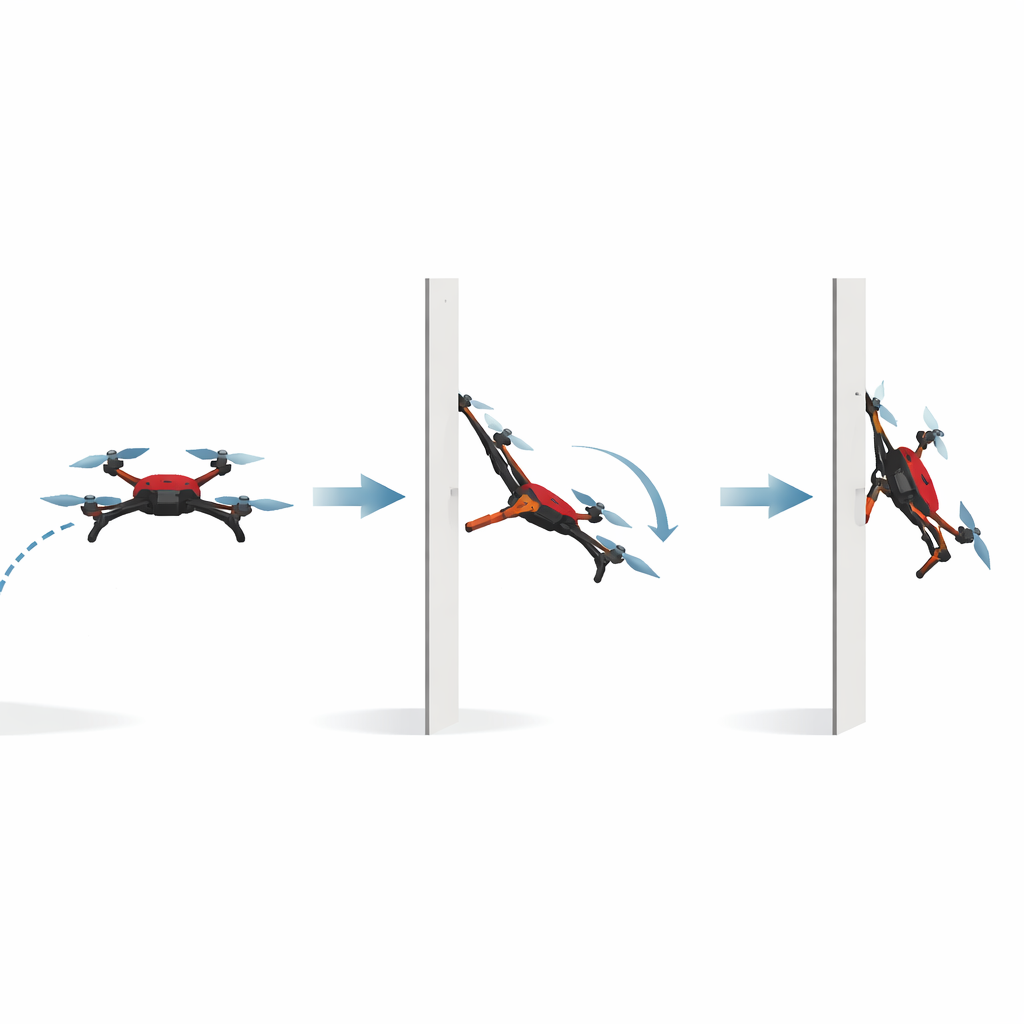
小型四旋翼无人机已被用于地图绘制、工程检测、野生动物监测和精准农业。然而它们最大的问题是续航:悬停消耗大量电池能量。在墙面、杆体或桥梁底部等表面停靠可以让无人机关闭大部分电机,同时保持传感器位置以进行长期观测。要安全完成这一动作并不简单。在短暂但关键的停靠机动期间,无人机必须接近墙面、接触并俯仰进入头朝下的姿态,且不能发生反弹、滑移或在突发阵风或模型误差干扰时失控。
干净着墙着陆的挑战
作者研究了在机头配有轻型支撑臂的四旋翼,该臂作为与墙面接触的物理点。当无人机从自由飞行过渡到接触时,其位置(横向、前后、上下)与姿态(横滚、俯仰、偏航角)紧密耦合:姿态改变会改变推力如何转化为运动,而墙面的突反作用力可能扭转机身。除此之外,真实环境效应——例如靠近墙面的气动相互作用、微小制造误差和传感器噪声——都会表现为未知扰动。现有的鲁棒控制技术可以保持无人机稳定,但常导致电机指令出现高频“抖振”,损耗硬件,并且通常只保证误差渐近收敛,而非在可预测的短时间内消失。
一种更聪明的平衡与自适应方法
为了解决这些问题,论文提出了一种自适应二阶连续控制(ASOCC)方案。简单来说,该控制器不仅关注无人机运动偏离目标的大小,还关注该误差变化的速度,并通过调整指令使两者在有限时间内收敛为零。内置的扰动观测器像一个实时的“噪声监听器”,估计未知力和模型不匹配的合成效应,并将该信息反馈到控制律中。更关键的是,用于决定控制反应强度的增益会根据这些估计在线调整,而不是事先固定。由于控制信号是平滑变化而非突变,该设计在显著减少抖振的同时仍保持较强的鲁棒性。
将新控制方法付诸测试
研究人员首先分析了观测器—控制器组合的数学性质,并利用类似能量的李雅普诺夫函数证明,尽管存在有界扰动,所有运动误差仍能在有限时间内收敛到零。随后他们在软件中仿真了激进的停靠场景,使无人机模型承受类风力、随机测量噪声以及刻意制造的参数误差。在这些试验中,ASOCC将无人机引导通过准备、接近和停靠三个阶段,同时保持位置和姿态误差小、控制输入平滑。与若干先进替代方法(包括流行的滑模和基于模型的控制器)相比,该新方法将关键跟踪误差指标约降低了35–55%。
从仿真到真实无人机的墙面停靠
在超越仿真的工作中,团队使用商用飞控板和3D打印机架(带前置支撑臂)构造了一台微型停靠四旋翼。在室内实验中,无人机自主飞向一面倾斜墙壁,上升到约一米高度,然后俯仰机头接触并保持附着。时间序列数据显示,海拔、水平位置和俯仰角均紧随其期望轨迹,仅出现由传感器噪声引起的小幅波动。尽管采用低成本硬件、存在通信延时和执行器限制,无人机在碰撞后没有弹开或振荡,表明ASOCC能应对飞行中的复杂现实问题。
对未来空中巡检者的意义
对非专业读者而言,关键结论很直接:这项工作提供了一种控制策略,使小型无人机能够在条件不理想时也能可靠地贴附在垂直表面并保持停驻。通过将平滑但强有力的纠正控制与自适应扰动观测结合,该方法实现了快速、精确的停靠,避免了许多鲁棒控制器带来的颤动和对硬件的应力。这为使用更轻电池、更简单平台并且更安全的长期空中监测打开了大门——向着由自主“贴墙”机器人组成的车队前进,它们可以默默守护基础设施、农作物和自然环境。
引用: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
关键词: 四旋翼停靠, 自适应控制, 无人机巡检, 扰动观测器, 空中机器人学