Clear Sky Science · zh
通过病房路径优化增强自主导航的智能患者护理机器人开发
帮助护士的机器人,而非取代他们
全球医院面临压力:老年患者增多、慢性病增多、医护人员已被拉扯到极限。该研究描述了一种智能患者护理机器人,其设计目标不是取代护理人员,而是悄然处理重复的监测和病房夜间巡查。通过自主且安全可靠地移动,该机器人可以帮助护士更早发现紧急情况——如跌倒或突发发热——同时减轻工作负担并降低在拥挤走廊和狭窄门框中发生事故的风险。
为什么医院走廊对机器人很难
乍看之下,医院走廊很简单:直线、干净的地面、规则的门。但对机器人而言远非如此。病床、推车、墙壁,尤其是狭窄的门框,会形成紧凑空间,哪怕是微小误差也可能导致碰撞。许多现有医院机器人依赖大量传感器和复杂硬件来应对这些情况。本研究团队走了另一条路:他们着力于使机器人仅用一个主传感器——二维激光扫描仪(用于测量周围距离)——再加上一种更智能的路径规划方式,就能安全移动。

构建护士的额外一双眼睛
研究人员在商用轮式底盘上开发了智能患者护理机器人(SPCR)。机器人机身上安装了一台三维相机,用于在不接触患者的情况下检测跌倒并读取生命体征;顶部装有一个二维激光传感器以全方位持续扫描周围环境。机器人内部配备嵌入式计算机、电池、驱动控制器和通信电子设备,能与控制应用通信并自主做出行驶决策。该机器人可全向移动,可弯曲相机臂以观察患者,并设计为能在真实医院环境中连续工作数小时。
用更智能的地图替代更多硬件
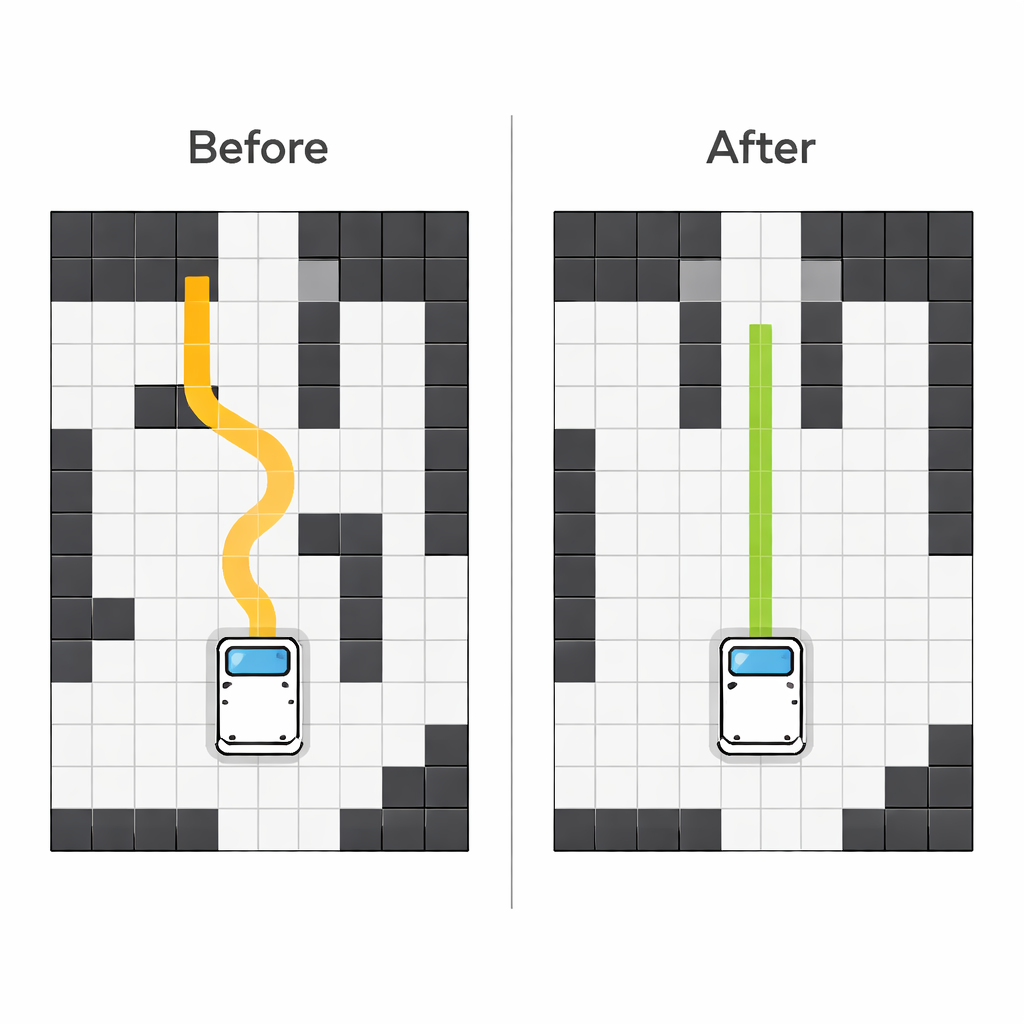
为了导航,机器人首先需要一张标明可通行与不可通行区域的地图。团队从精确的医院走廊平面图出发,将其转换为网格化地图,每个小方格被标注为自由空间、墙或障碍物。与其直接使用原始地图,他们对地图进行了更为谨慎的重塑。引入了“虚拟障碍空间”——额外的被屏蔽区域,温和地将机器人推离诸如门边和狭窄拐角等高风险点。基于改进版 D* Lite 算法的路径规划软件随后在这张更安全的地图上搜索路径,避免急转并让机器人在狭窄通道中更靠近中央行进。
在真实病房中测试机器人
该系统在一段实际医院走廊中进行了测试,该走廊被分为三部分,包含不同组合的走道、门和障碍物。机器人需要在检查点之间移动,通过标准的 90 厘米宽门,并避开墙壁和固定物体。由于机器人本身宽约 76 厘米,通过门时两侧仅有几厘米的间隙——这是许多机器人表现不佳的条件。通过对比调整网格地图前后的表现,研究者发现机器人在不碰撞完成路线的成功率在所有区域均提高了 30% 以上,路径更平滑、不必要的机动减少。
这对未来患者护理意味着什么
对于非专业读者,核心信息很简单:与其给机器人不断堆传感器,本研究表明,谨慎的数字地图设计和更智能的路径规划可以使医院机器人更安全、更实用。一台能在夜间可靠通过狭窄门、沿高效路径行驶并悄然检查患者基本生命体征的机器人,能够让护士把更多精力放在人类护理上——安慰家属、做复杂决策和处理紧急情况。作者把这项工作视为基础:未来版本将加入更多传感器和更丰富的患者监测功能,目标是实现可在真实医院环境中安全移动并可靠全天候工作的机器人助理。
引用: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
关键词: 医院机器人, 自主导航, 患者监测, LiDAR 绘图, 路径规划