Clear Sky Science · zh
基于强化学习的模型预测控制用于优化潜艇推进系统中的反向转子永磁同步电机
让潜艇更安静的智能电机
现代潜艇依赖安静且高效的推进系统来探索海洋并执行科学、商业或军事实验任务。本研究考察了一种特殊的电机,它驱动两枚方向相反的螺旋桨,帮助潜艇在水中平稳且悄无声息地航行。研究人员展示了如何将先进的预测工具与学习算法相结合,以在遭遇波浪、洋流或突发机动扰动时,仍能保持这些电机的稳定性与高效性。
双桨同心,一体平稳
传统的单螺旋桨系统在高速时会引起潜艇扭转和滚动,影响操纵并增加被探测的风险。为避免这种情况,工程师采用反向旋转螺旋桨系统:两枚装在同一轴上但反向旋转的螺旋桨。该结构的核心是反向转子永磁同步电机(CRPMSM),本质上是两个紧凑且高转矩的电机叠置在一起。这种安排可以抵消不希望出现的扭转力矩,改善能耗并降低噪声,这些都是隐身性和长航时任务所必需的。然而,当两侧转子负载失衡时,例如在湍流或急转弯情况下,使两侧保持完全同步成为一项严峻的控制挑战。 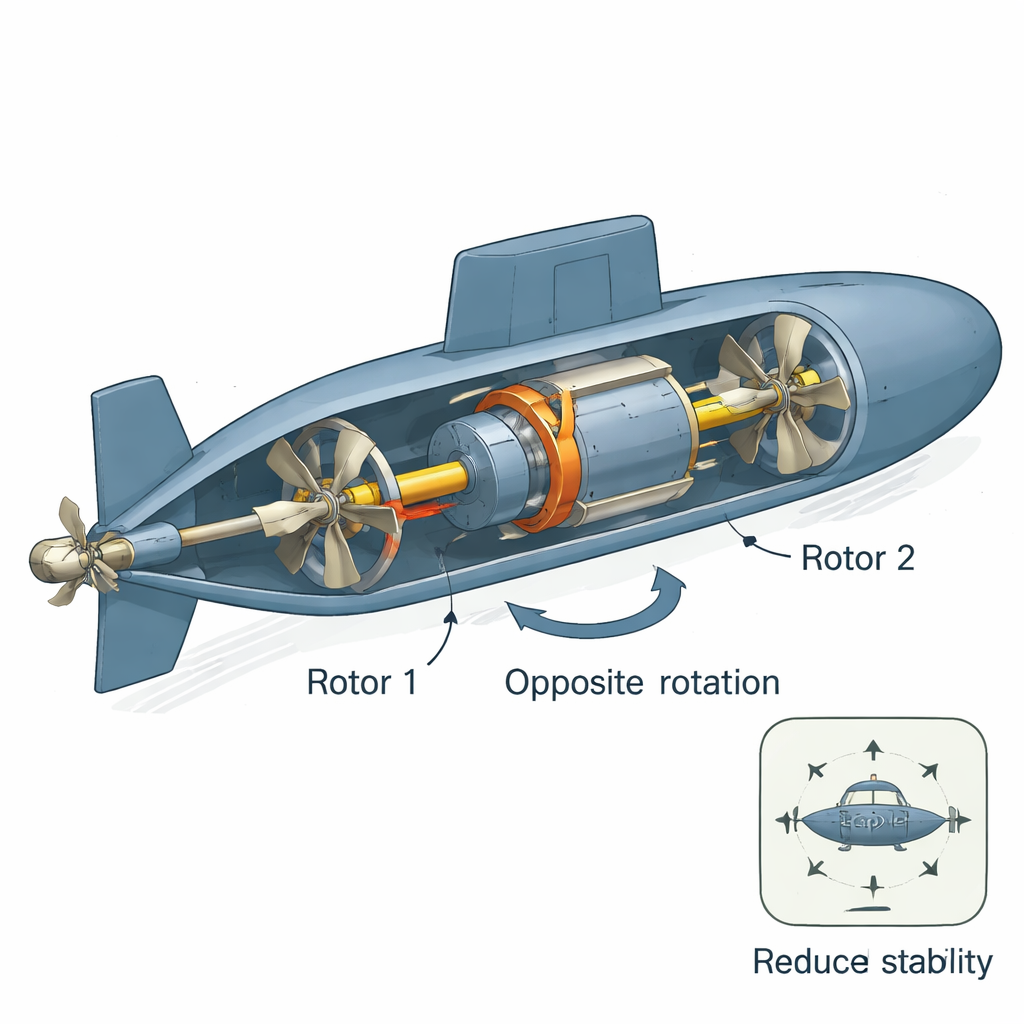
传统控制为何力不从心
工程师已尝试多种控制策略来保持CRPMSM转子的同步与高效。诸如磁场定向控制和直接转矩控制等方法在平静且可预测的条件下表现良好,但在水下环境迅速变化或高度不均匀时会遇到困难。更复杂的技术,如滑模控制、模糊控制和自适应控制提高了鲁棒性,但它们通常依赖对电机及周围水环境的高精度数学模型。实际上,这些模型永远不可能完全准确,模型误差可能导致转矩波动增加、扰动后恢复变慢以及能量浪费。模型预测控制(MPC)通过对短期未来进行最优控制规划以实现快速响应,但它仍然高度依赖所用模型的质量。
会“学”的混合控制器
作者提出了一种混合的强化学习驱动模型预测控制(RL-MPC)框架,结合了两者的优点。MPC 使用 CRPMSM 的数学模型预测未来几个控制步长内电流、转矩和速度的演化,并选择电压指令以跟踪期望的速度和电流目标,同时满足各项约束。在此之上,一个基于双延迟深度确定性策略梯度(TD3)算法的强化学习智能体观测真实电机的行为。通过在速度误差、电流误差和控制开销较小时给予奖励,学习智能体逐步调整 MPC 的输出以补偿建模误差、负载不平衡和外部扰动。随后,空间矢量脉宽调制阶段将这些优化后的电压指令转换为驱动逆变器的换流信号。
把智能电机放到考验中
为评估其方法,研究人员在 MATLAB/Simulink 中建立了一个 120 kW 反向转子电机系统的详细仿真,并在三种现实工况下进行了测试。第一种情形下,电机在恒定速度下运行,尽管两个转子的负载变化但仍保持平衡;第二种情形下,在恒定负载下改变速度;第三种也是最具挑战的一种情形,两个转子在速度设定不变的情况下承受不同的负载。在每种情况下,RL-MPC 都与使用相同预测与控制视窗的传统 MPC 进行了直接比较。 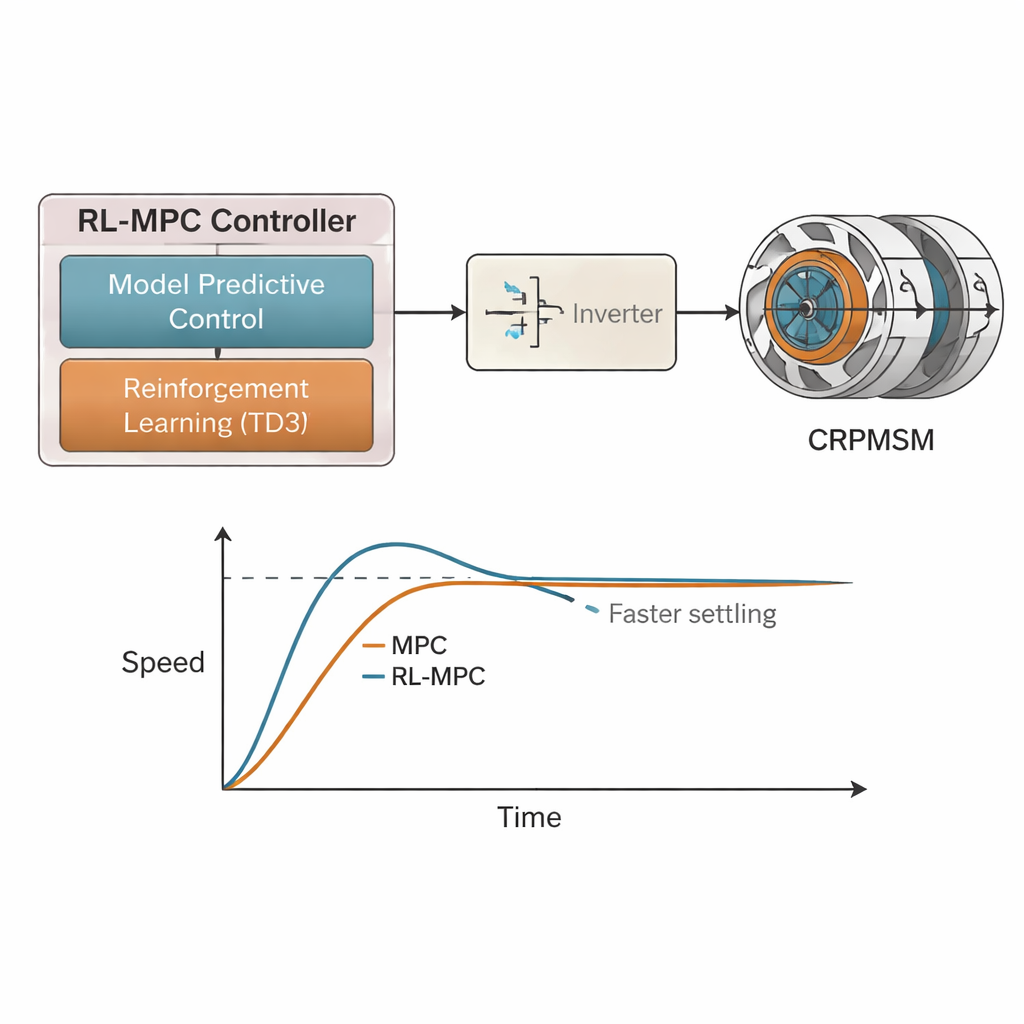
更快响应、更清洁的电流、更好的同步
混合 RL-MPC 控制器在所有测试中均优于标准 MPC。负载或速度突变时,RL-MPC 将速度超调从约 30% 减少到约 15–16.6%,并将整定时间从约 1.4 秒缩短到 0.7 秒左右。转矩波动更小,即便一侧转子负载明显高于另一侧,两枚反向旋转的转子也能保持紧密同步。同样重要的是定子电流的质量显著提升:在剧烈的不平衡负载瞬态中,总谐波失真降低了超过 60%,从 MPC 的 9.3% 下降到 RL-MPC 的 3.4%,在稳态时甚至低至约 2–3%。电流更“干净”意味着更少的发热、更安静的运行以及更高的整体效率。
对未来水下航行器的意义
对非专业读者而言,核心信息是:在预测控制器之上增加一层学习能力,可以让潜艇电机更智能、更鲁棒。与其单纯依赖在海况恶劣或车辆急转时可能失效的固定方程,RL-MPC 框架能在线自适应,保持双转子电机的同步性、响应性和效率。尽管目前的结果基于仿真,仍需在实际硬件和真实海洋环境中验证,但这项工作指向了未来的水下航行器:它们能在相同能量下航行更远、产生更少噪声,并在复杂环境中保持稳定与可控。
引用: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
关键词: 潜艇推进, 反向转子电机, 强化学习控制, 模型预测控制, 水下航行器