Clear Sky Science · zh
基于图信号处理的FDA-MIMO雷达联合距-角-速度估计算法
为拥挤嘈杂的世界打造更智能的雷达
从自动驾驶汽车到飞机监视,现代社会高度依赖能够快速、可靠发现并跟踪目标的雷达系统。随着天空、道路和电波频谱变得愈发拥挤,雷达必须在强干扰和噪声存在下识别多个运动目标。本文提出了一种新方法,利用新兴领域——图信号处理的工具,使一类强大的雷达(称为FDA-MIMO雷达)在三维(距离、方位和速度)上看得更清楚。
为何这种新型雷达结构重要
传统相控阵雷达主要在角度上扫束,类似于左右摆动手电筒。频率多样阵列(FDA)雷达则不同:每个天线单元以略有差别的频率发射。这个小小的变化使得波束模式不仅依赖角度,还依赖距离和时间。与多输入多输出(MIMO)技术结合后,FDA-MIMO雷达在理论上可以在三维空间中精确定位目标:目标的距离、角度位置以及运动速度。挑战在于如何从原始回波中快速且准确地提取所有这些信息,尤其当目标众多且信号被噪声淹没时。
将雷达回波转化为网络问题
作者通过将雷达测量重新构想为“在图上”存在的信号来应对这一挑战——一个由节点和连接构成的网络。图中的每个节点代表FDA-MIMO阵列中的一个特定发/收天线对,连接刻画了相邻节点之间在空间上信号的相关性。通过精确定义这些连接,他们构建了一个“邻接矩阵”,描述若目标位于某一距离和角度时,回波应如何在阵列上传播。当假定的距-角对与真实目标一致时,测得的回波模式将几乎与图的某个自然振动模式对齐。实际上,这意味着经过基于图的傅里叶变换后,能量会在单一谱分量上集中成一个非常尖锐的峰值。算法在距离和角度值的网格上搜索此类峰值,以确定目标位置。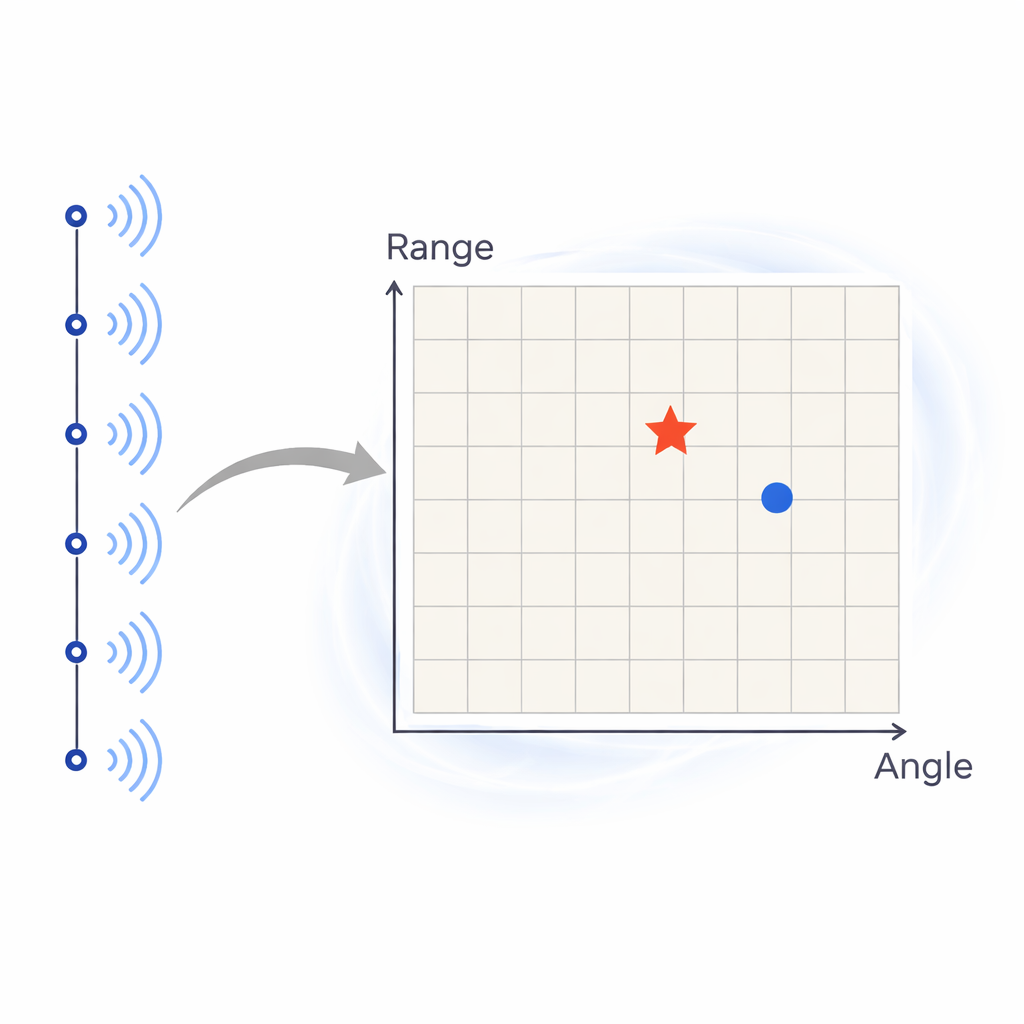
加入运动:用相同思路测量速度
为估计目标速度,该方法将图的概念扩展到时间维度,跨越多次雷达脉冲。此时每个节点代表一个时间脉冲,连接将相邻脉冲首尾相连以捕捉若目标具有某一径向速度时信号应如何演化。同样地,当假定速度与真实速度相符时,变换后的信号在图的谱域中会出现集中峰值。算法扫描候选速度,寻找峰值最强的位置。关键在于,作者将框架设计为使来自空间图的距-角估计和来自时间图的速度估计相互强化。所有天线和所有脉冲的数据被合并,形成一个多维结构,在不重复计算的情况下提高了精度。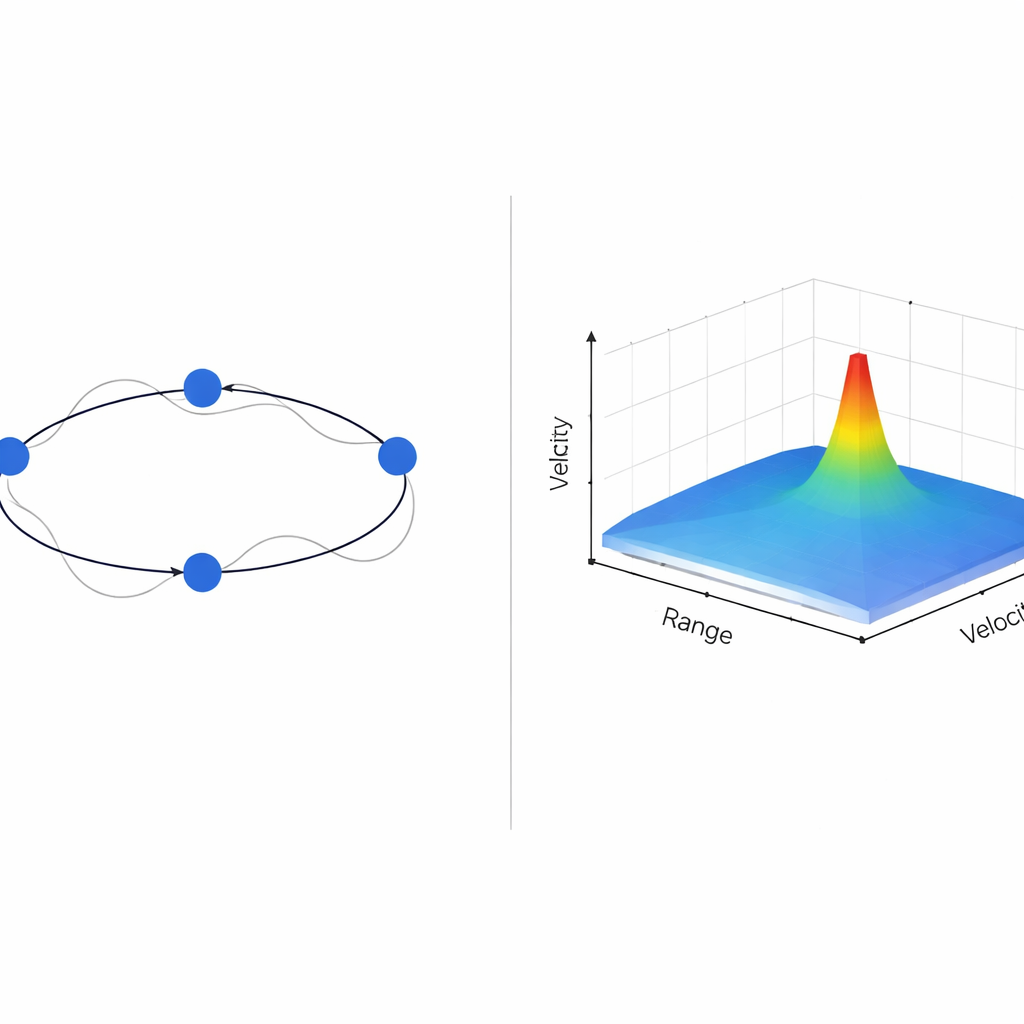
将该方法付诸检验
通过一系列仿真,研究人员将他们的基于图的方法与一种广泛使用的高精度技术MUSIC进行比较。他们测试了单目标和多目标情形,考察每种方法分辨相邻物体的能力,并在信号相对于噪声非常弱的情况下评估性能。基于图的算法在总体计算负担上与经典方法相当,但在距离、角度和速度上提供了更尖锐的分辨率。它在抑制由噪声引起的虚假峰值方面尤其有效,从而得到更清晰、更可靠的目标图。即使在信噪比较差——许多传统方法表现不佳的条件下——新算法仍能保持目标位置和速度的紧致误差界。
对现实世界雷达的意义
简而言之,这项工作展示了将雷达数据视为“驻留在网络上”的方式如何实现更智能的处理,从而更干净地将真实目标与杂波分离。对于国防、空中交通管制到汽车安全和环境探测等应用,所提出的技术有望在复杂条件下更准确地跟踪多个运动物体,且无需不切实际的计算量。通过将先进的天线设计与基于图的数学方法融合,作者展示了朝着能够在日益复杂的电磁环境中更远、更清晰、更可靠观测的雷达迈出的可行路径。
引用: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
关键词: 雷达感知, 目标跟踪, 信号处理, 图信号处理, FDA-MIMO