Clear Sky Science · zh
具有PPO启发式的方向感知与自适应A*算法用于智慧城市无人机路径规划
为城市无人机设计更智能的航线
想象成群的小型配送无人机穿梭于摩天大楼之间,运送药品、包裹或应急物资穿越繁忙的城市。为了安全且快速地飞行,每架无人机必须不断决定下一步的飞行方向。本文提出了一种在拥挤的三维城市空间中为无人机寻找更优路线的新方法,使得航线比传统方法更短、更平滑、更可靠。

为什么找到好路径如此困难
对于无人机来说,选择路径不只是从A点到B点画一条直线。它必须躲避建筑、树木和禁飞区,同时遵守转弯和高度的约束。经典的路径规划方法,例如众所周知的A*算法,在简单地图上表现良好,但在真实的三维城市环境中却力不从心。它们常常要检验过多的候选步,浪费计算资源,并且可能产生折返的路径,导致路径比必要的更长,或者在环境非常拥挤时失败。随着智慧城市变得愈发复杂,这些弱点成为安全高效空中交通的严重瓶颈。
对经典工具的方向感知升级
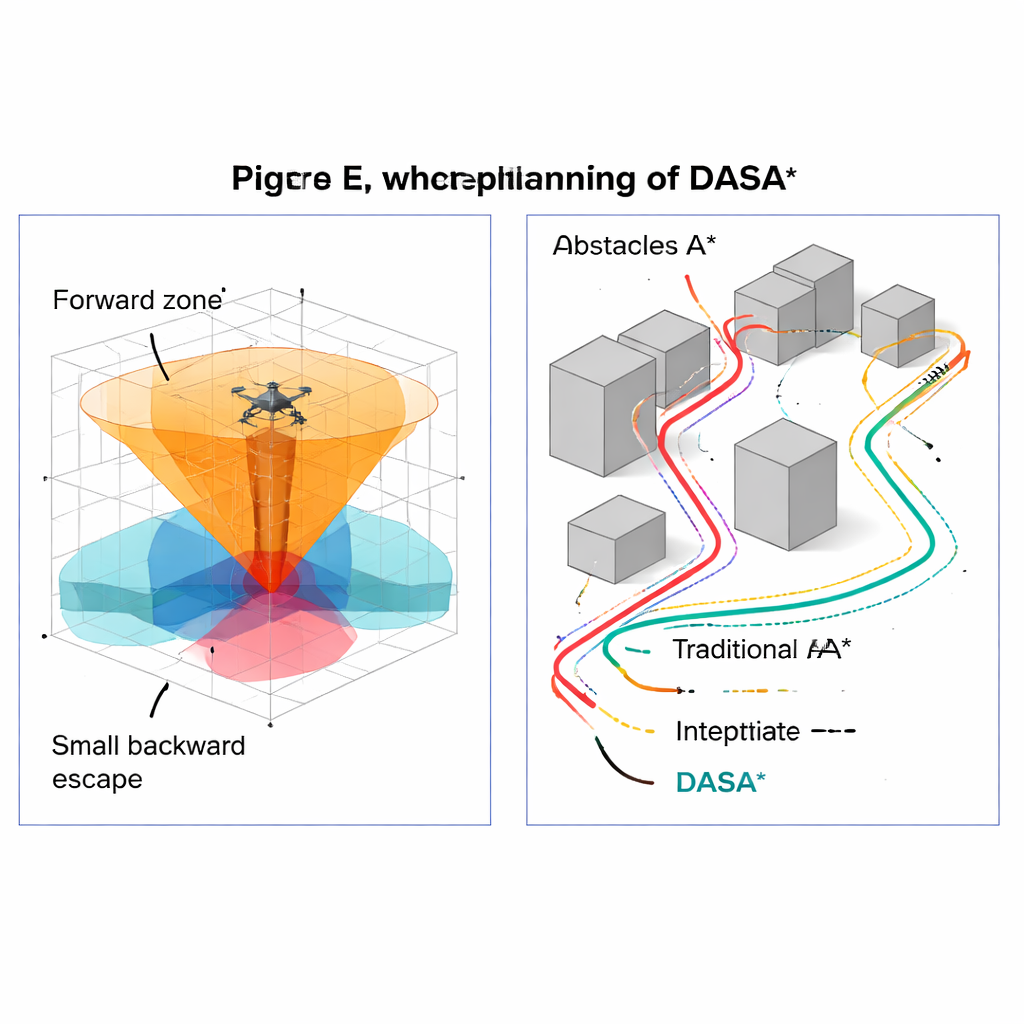
作者在A*算法的基础上提出了增强版本,称为DASA*(Direction‑Aware and Self‑Adaptive A*,方向感知与自适应A*)。DASA*不是盲目地在无人机周围向各个方向搜索,而是关注目标所在方向。它将附近的候选位置分为三层:主要位于朝向目标前方的点、位于侧向的点,以及少量位于后方可用于脱困的点。一个简单的停滞检测器监视搜索何时出现“卡住”的迹象,然后在需要时将搜索从狭窄的前方锥扩展到更完整的邻域。这种以目标为中心的谨慎扩展减少了无谓的探索,同时仍保证如果存在可行路径就能被找到。
在拥挤与开阔空间之间自适应
DASA*的另一个关键特性是根据周围环境调整步幅。当无人机远离障碍物时,算法采取更大步长,快速跨越开阔区域;接近建筑或其他危险时,则切换到更小步长,以便在狭窄空隙中进行精确机动。这种可变的“缩放级别”使得规划器在安全的地方快速前进,仅在需要精度的地方放慢速度。在找到初步路径后,专门的调整阶段会移除不必要的路点,并在剩余关键点间拟合平滑曲线。最终得到的路线不仅能避免碰撞,而且更像熟练飞行员会选的自然航迹,转向更少、突变更少。
教算法学会前瞻
传统A*依赖简单的距离公式来估算每个位置到目标的远近。DASA*用基于近端策略优化(Proximal Policy Optimization,PPO)的学习型引导取代了这种猜测。在训练环境中,一个虚拟智能体反复练习在三维空间中朝目标移动,同时感知距离、高度差和方向信息。神经网络逐步学会评估每种情形的前景好坏,训练完成后作为DASA*的“直觉模块”插入使用。这个学习到的启发式能更直接地引导搜索朝向良好解,尤其在简单直线距离具有误导性的复杂布局中表现突出。
在虚拟城市中的表现如何
研究人员在多个填充盒状建筑和圆柱形障碍以模拟真实城市结构的三维城市场景中测试了DASA*。他们将其与经典A*及若干流行替代方法进行对比,包括改进的快速探索树、粒子群、差分进化以及另一种A*变体Theta*。在大量测试情况下,DASA*始终找到更短的路径,扩展的候选点明显更少,运行速度也快得多——通常比标准A*快10到50倍。即便在致密、迷宫般的环境中,它也能保持完美或近乎完美的成功率,而一些竞争方法则更容易失败或产生冗长的回环绕行。
这对日常生活意味着什么
通俗地说,DASA*赋予飞行机器人更好的方向感与判断力。通过聚焦有前景的方向、根据局部环境自适应细节粒度、使用学习得到的成功感知并打磨最终航线,它能把原始地图数据变成高效、平滑且实用的飞行路径。如果在真实系统中采纳,这种方法有望帮助未来的智慧城市更安全可靠地管理无人机配送、巡检和应急响应,即便天空变得更繁忙、环境更复杂。
引用: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
关键词: 无人机路径规划, 智慧城市无人机, A*算法, 自主导航, 机器人运动规划