Clear Sky Science · zh
基于改进超扭动滑模观测器与平滑过渡优化的PMSM全速域位置无传感控制策略
在不增加硬件的情况下让电机保持智能
从电动汽车到飞行器执行机构,许多现代设备都依赖一种称为永磁同步电机(PMSM)的电机。这类电机效率高、功率密集,但通常需要精密传感器来跟踪转速和转子位置。传感器会增加成本,并且在恶劣环境中易损坏。本文研究如何在不使用任何机械传感器的情况下,使这些电机在整个速度范围内平稳且精确地运行。
为何去除传感器如此困难
在典型的PMSM驱动中,位置传感器安装在电机轴上,向控制系统提供转子精确位置。这一信息对于在恰当时刻向绕组注入电流至关重要,就像在旋转的旋转木马上给出一次精准推力。然而,传感器可能脆弱、体积大且价格昂贵。工程师长期尝试用“无传感”方法替代它们,通过电机自身的电信号推断转子位置。问题在于,没有一种方法能在所有转速下都表现良好:在低速时电气特征微弱难以测量,而在高速时简单技巧会变得噪声大且不准确。在不产生冲击、振动或控制丧失的情况下弥合这一差距一直是一个挑战。
两种巧妙的“聆听”方式
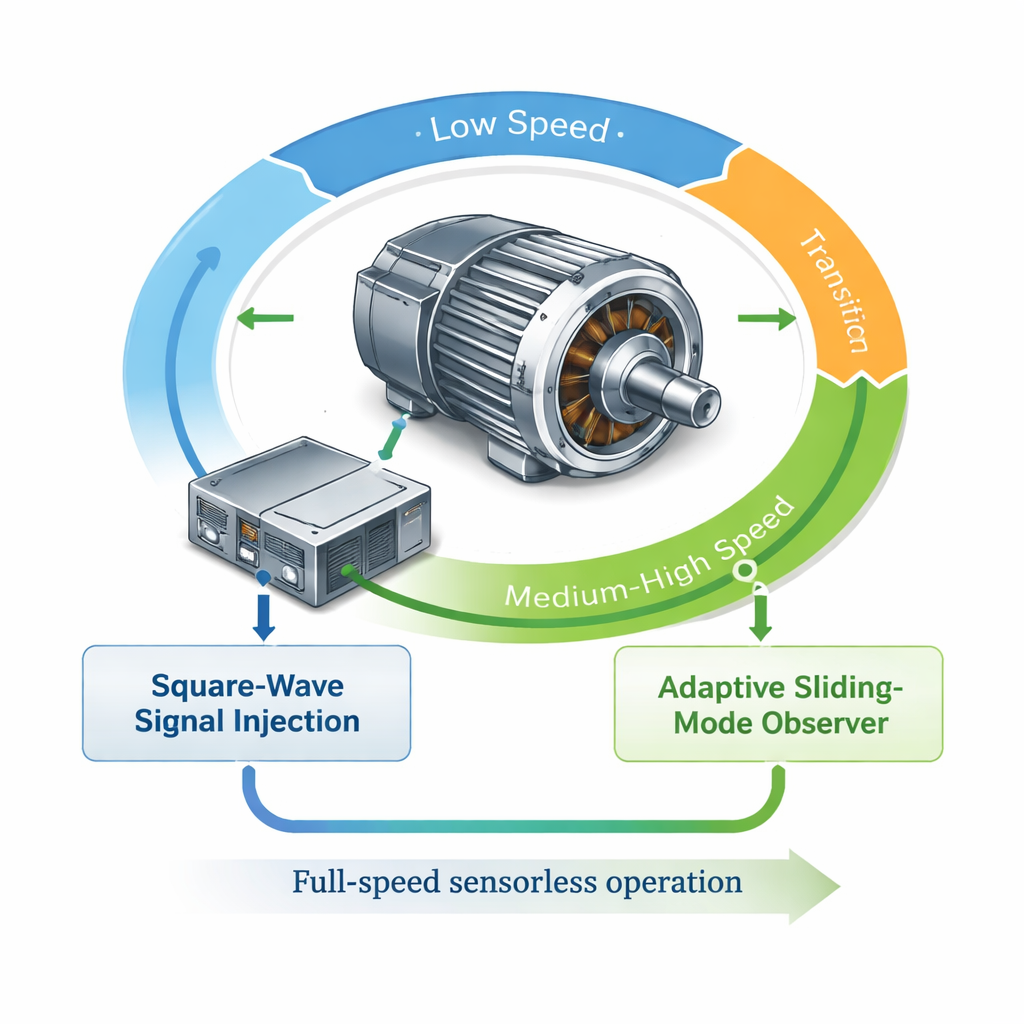
为了覆盖全速域,作者将两种互补的无传感技术结合起来。在低速区,由于电机的自然电反馈太弱难以可靠测量,他们有意向绕组注入高速方波电压信号。电机会根据转子角度产生不同响应,通过分析由此产生的高频电流,控制器即可推断出转子位置。这种“高频注入”方法类似于发送探测信号并读取回声。在中高速度区,电机会产生更强的自然反馈,即反电动势。对此,团队使用一种先进的数学观测器,通过测量到的电压和电流追踪电机行为并估计转子位置与速度。
让数字观测器更聪明更安静
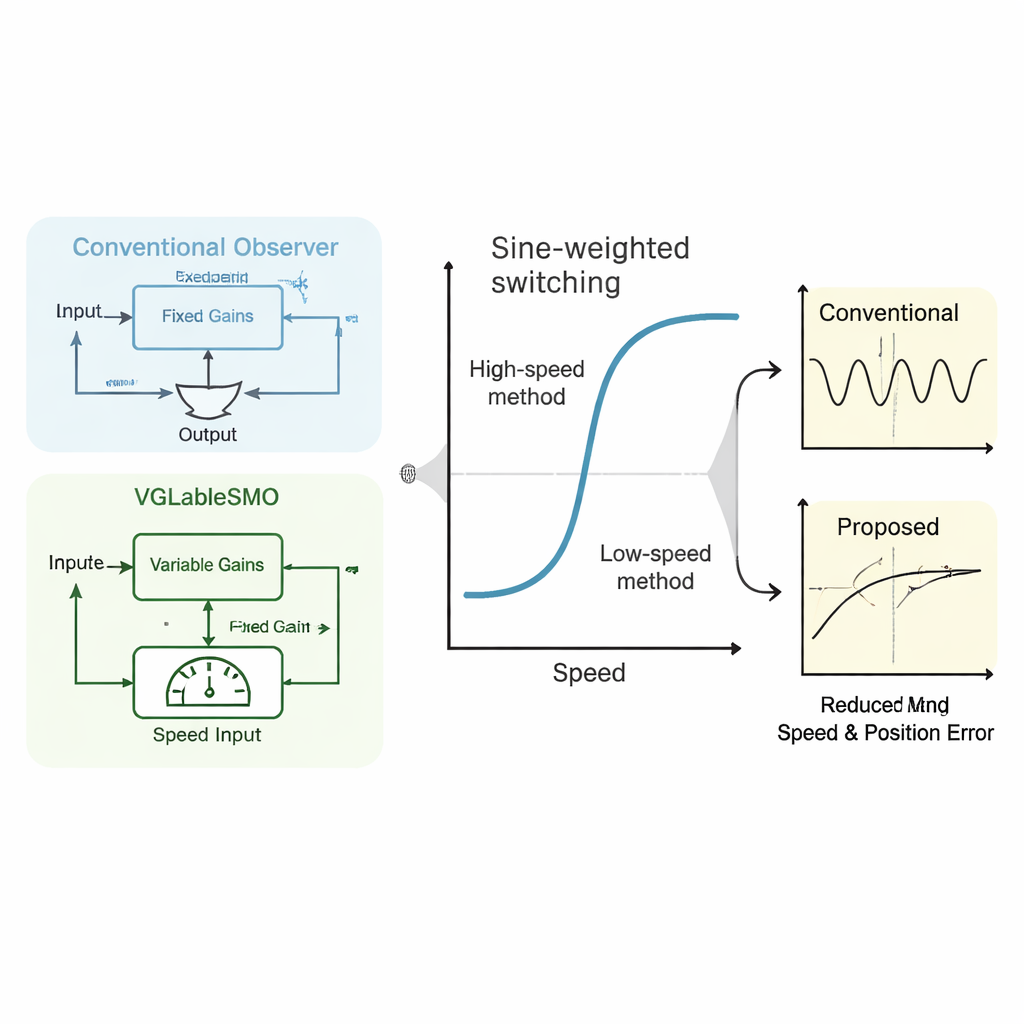
在高速端的核心创新是一种改进的观测器,称为变增益线性超扭动滑模观测器(VGLSTSMO)。传统滑模观测器因对噪声与干扰的鲁棒性而受推崇,但常出现“抖振”——微小且高速的振荡,会传递到转矩与速度中。它们还依赖固定内部参数,这些参数在某些工况下表现良好但在其它情况下表现不佳。所提出的观测器会随电机速度变化自动调整内部增益,并加入一个修正项,将估计值平缓拉向真实值。一个自适应机制进一步细化对电机内电压的估计,提高了速度与位置的精度。仿真结果表明,这种更智能的观测器可将中高速下的位置误差从约0.9弧度降至约0.2弧度,并缩短工况变化后系统的稳态时间。
平滑低速与高速之间的切换
使用两种不同估计方法还带来另一个问题:在电机加速时如何平滑地交接。一种简单做法是用直线加权淡出一种方法并淡入另一种,但这仍可能导致转矩与速度上的颠簸。作者提出了一种更柔和的正弦形加权函数。在选定的过渡带内,控制系统沿着平滑的波形曲线逐步将信任从低速方法转移到高速观测器,而非陡峭的斜坡式切换。这种改进的混合方式显著减少了换挡期间的速度跳变与角度缺陷,降低了瞬态角误差并将误差收敛时间减半。
对实际机械的意义
总体而言,结合策略——在低速对电机进行探测、高速采用自适应观测器、并用平滑正弦加权在两者之间切换——实现了在无机械传感器情况下全速域的稳定且精确控制。仿真中,所提方法在避免产生会导致噪音、磨损和不适的剧烈抖振的同时,使速度超调和稳态误差保持较小。对于日常应用,这意味着电动汽车、工业驱动和推进系统能够变得更可靠、更紧凑、制造成本更低,同时在无需依赖易碎轴装传感器的情况下保持精确的运动控制。
引用: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
关键词: 无传感器电机控制, 永磁同步电机, 滑模观测器, 高频信号注入, 电驱动系统