Clear Sky Science · zh
使用来自 EEG 片段的时域与频域特征和随机森林回归估计机器人辅助手术中的认知工作负荷
为什么机器人手术中的心理负荷很重要
机器人辅助手术承诺更小的切口、更快的恢复和更稳的操作。但在机器人后面坐着的是一名人类外科医生,他们的大脑可能会被复杂的视觉信息、控制界面和高风险决策压垮。这项研究提出了一个简单却后果重大的问题:我们能否实时读取外科医生的大脑信号来估计他们的心理负荷,并利用这些信息帮助他们保持敏锐、保障患者安全?
在机器人手术中倾听大脑
研究人员没有依赖清单或直觉,而是转向脑电图(EEG),一种测量头皮上微弱电信号的技术。他们使用了一个公开数据集,包含 25 位受试者在佩戴 128 电极帽进行机器人辅助手术任务时的记录。这些传感器捕捉来自不同脑区的节律:前额(计划与决策)、两侧(听觉与记忆)、顶部(触觉与空间感知)和后部(视觉)。目标是将这些原始且嘈杂的波形转换为对“认知工作负荷”的连续估计——即大脑在任一时刻的工作强度。
清理并压缩大脑信号
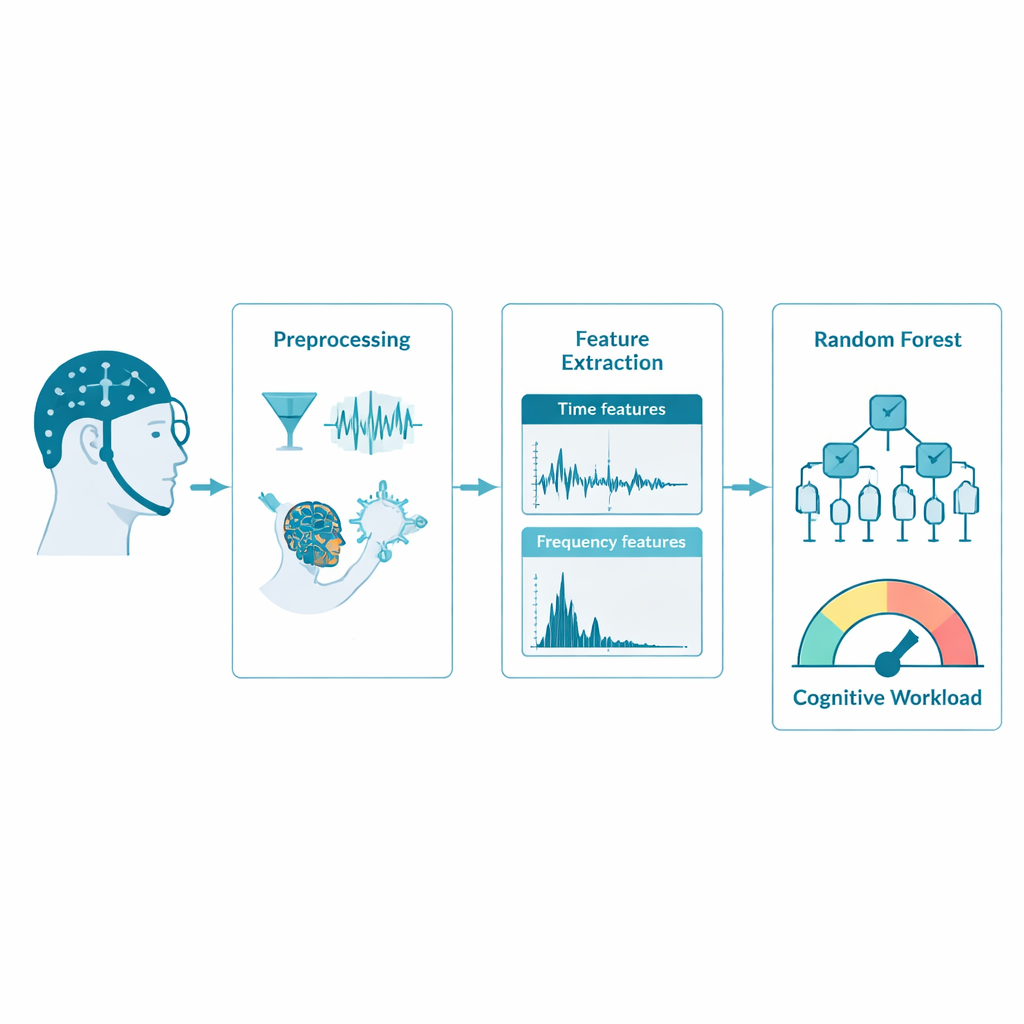
原始 EEG 更像一座城市的电网,而不是清晰的大脑读出:它充斥着来自眨眼、肌肉抽动和电源线的干扰。团队首先通过滤除不需要的频段并使用一种称为独立成分分析的数学方法去除眼动和肌肉伪迹来清理数据。为了让系统足够快以接近实时使用,他们将采样率从 500 降到 128 次/秒。通过对比该步骤前后的脑图和频谱图,研究者确认关键模式得以保留,使得信号在保持科学价值的同时处理成本大幅降低。
把波形变成有意义的数字
接着,研究者将连续的 EEG 切分为一秒的“片段”,并用简单的统计量与频率内容描述每一小段。时域特征,例如平均信号幅值、变异性、偏态以及零交叉次数,捕捉了脑活动的总体形态与能量。频域特征则关注经典频段的功率分布,如与努力和工作记忆相关的 theta、与放松与抑制相关的 alpha、与注意力相关的 beta,以及与复杂处理相关的 gamma。这些数值共同构成了每秒钟大脑状态的紧凑指纹,供计算机学习使用。
教一片决策树的森林读懂工作负荷
为了将这些 EEG 指纹与认知工作负荷联系起来,团队使用了一种名为随机森林回归的机器学习方法。与使用单一复杂公式不同,该方法构建许多简单的决策树,每棵树各自给出预测,然后将它们组合成更可靠的“集成”答案。模型学会预测各脑区的激活强度,将这种激活作为心理负荷的代理。横跨额叶、颞叶、顶叶和枕叶,模型与真实激活的匹配表现极佳,准确率(R²)超过 0.93,尤以负责整合声音、记忆与感知的颞区表现最强。
模型揭示的脑工作方式
通过检查随机森林最依赖的特征,研究还揭示了哪些脑信号与心理负担相关。信号能量与突发样脉冲(均方根和峰度)以及特定频段的功率尤为有信息量。不同脑区强调不同特征:例如,顶叶与枕叶的快速 beta 和 gamma 活动与大量视觉与空间处理相对应,而额叶的模式则反映了决策负荷。这些区域特定的特征签名表明,该方法未来可能适配为更轻便的 EEG 帽,仅关注最有信息量的部位。
从实验室研究到更安全的手术室
对非专业读者来说,结论很明确:这项研究概述了一个实用的配方,可将头皮传感器和智能算法转化为外科医生的连续“心理负荷仪”。尽管当前工作使用的是来自有限参与者群体的归档数据,但研究表明通过谨慎的清理和特征设计,一个相对简单的机器学习模型就能以高精度和低计算成本跟踪认知工作负荷。未来,这类系统可以帮助机器人控制台自动简化界面、调整节奏或标记过载时刻,从而像机器人帮助外科医生的手一样,可靠地支持他们的大脑。
引用: Atheef G A, M., Powar, O.S. Estimating cognitive workload in robot assisted surgery using time and frequency features from EEG epochs with random forest regression. Sci Rep 16, 7624 (2026). https://doi.org/10.1038/s41598-026-35986-5
关键词: 认知工作负荷, 机器人辅助手术, 脑电监测, 机器学习, 脑机接口