Clear Sky Science · zh
结构参数对三角并联机器人工作空间的影响及用于茶青叶分拣的路径适应性优化
机器人走进茶厂
鲜茶叶很脆弱:压碎一个芽或挫伤一片叶子都会影响最终的茶汤。然而人工分拣既辛苦又慢。本文探讨一种快速、轻量的工业机器人——三角(Delta)机器人——如何调校,使其在茶叶传送带上既能高速精确运动,又能温和可靠地处理茶叶。
为什么茶叶需要特殊对待
在现代制茶过程中,对鲜叶的分拣关系到品质和价格。人工在长期班次中难以保持速度与一致性。三角机器人在高速包装中被广泛采用,似乎是自然的选择:它们刚性好、精度高、速度快。但以往的设计多面向箱子或坚硬物体,而非受限于两条传送带间狭窄区域内的脆弱茶芽。机器人的“工作空间”——它能到达的三维区域——必须匹配这片狭小区域,并遵循特定的门形运动:抓取、抬起、横移与放置,全过程不能碰撞自身构件或错过目标。
机器人几何形状如何决定可及区域
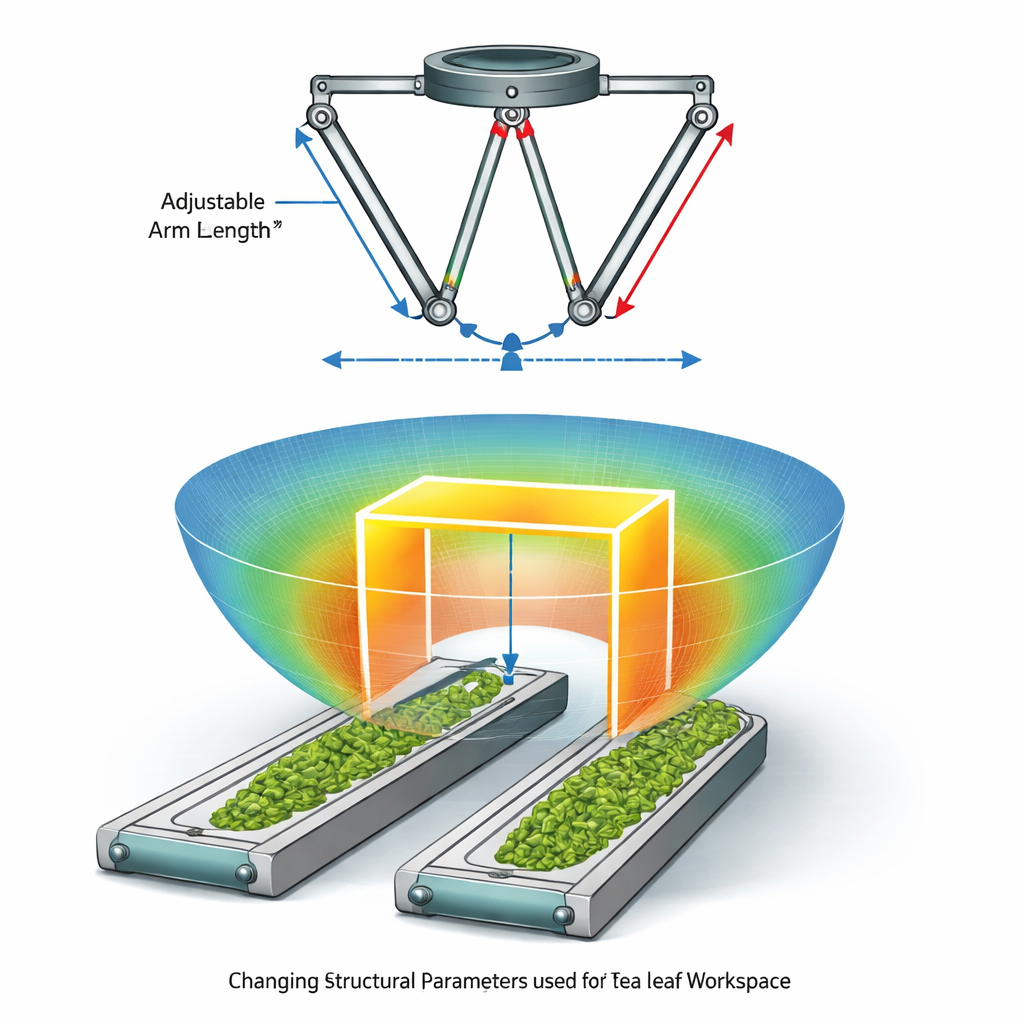
作者首先建立了三角机器人运动的详细数学描述,将三条驱动关节的角度与承载吸盘的小型活动平台的位置联系起来。通过正运动学(角度到位置)和逆运动学(位置到角度)计算,他们定义了当关节角度限制在安全范围内时末端执行器能到达的每一个点。将这些方程用 MATLAB 编码后,他们仿真出机器人的完整可达体,并从多个视角以彩色碗状点云展示。该工作空间成为判断某一机械设计是否能满足茶叶分拣路径的基础。
用虚拟实验测试多种设计
研究团队没有制造多个实体原型,而是将四个关键几何参数作为设计旋钮:上臂长度(L)、下臂长度(l)、固定底座三角形半径(R)和活动平台三角形半径(r)。他们采用正交试验布局,有效地对这四个参数的三个水平组合进行采样,得到九种虚拟机器人。对每种设计,程序计算整个工作空间体积,并展示其与标准化的门形路径盒(高200 mm、宽400 mm、深200 mm)的重叠情况。这不仅让研究者看到每种工作空间的总体大小,还能判断它是否覆盖茶叶在传送带上运动的区域。
找出最重要的尺寸
通过比较九种仿真设计,研究对各结构参数影响可用可及性的强弱进行了排序。最显著的是被动(下)臂长度:下臂越长,工作空间显著增大。其次是主动(上)臂长度,也能扩展运动范围,但过长可能引入振动。底座半径影响居中等;底座过宽会使活动臂更容易与框架发生碰撞,从而缩小真正可用的体积。移动平台半径的影响最弱,但较小的平台仍能略微增加臂的活动空间。极差和方差分析显示,虽有些参数组合能获得最大的总体工作空间,但它们未必覆盖对茶叶分拣至关重要的狭窄门形区域。
适合茶线的设计
最实用的配置并非总体体积最大的那种,而是其工作空间能恰好包围门形轨迹的方案。一个具体组合——上臂250 mm、下臂400 mm、底座半径90 mm、活动平台半径50 mm——能够完全覆盖两条传送带之间所需的路径,同时保持机器人紧凑且稳定。在参考平面上方约325 mm 的工作高度时,机器人达到其最宽的可用跨度,足以跨越两条传送带并完成抓取—抬起—平移—放置循环,而不脱离安全区域。
对未来茶厂的意义
对非专业读者而言,关键信息是:机器人的连杆长度和平台尺寸的细微变化,可能决定一台机器是在开放空间中看似灵活,还是能在真实生产线上可靠工作。通过量化每个结构参数如何塑造可达体及其与实际门形路径的重叠,本研究提供了一套为茶叶分拣设计三角机器人的配方,使其在高速、精确与轻柔处理之间取得平衡。相同的方法也可用于为其他食品或易碎品定制机器人,在需要同时满足速度、精度与温和处理的场合中发挥作用。
引用: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
关键词: 三角机器人, 茶叶分拣, 机器人工作空间, 抓取与放置, 工业自动化