Clear Sky Science · zh
使用反馈线性化与自适应滑模控制的最佳燃料电池控制建模
为何更智能的燃料电池对日常生活至关重要
氢燃料电池汽车承诺排放仅为水蒸气、加氢迅速且续航里程长。但在每个燃料电池堆内部,薄膜和严格受控的气流必须保持在安全范围内。如果膜一侧的压力相对于另一侧过高,膜可能会受损,从而缩短系统寿命并降低可靠性。本文探讨了一种更精确控制这些压力的新方法,帮助未来的燃料电池车辆更高效地运行、寿命更长,并能更好地应对真实驾驶条件。
保持燃料电池“肺部”的平衡
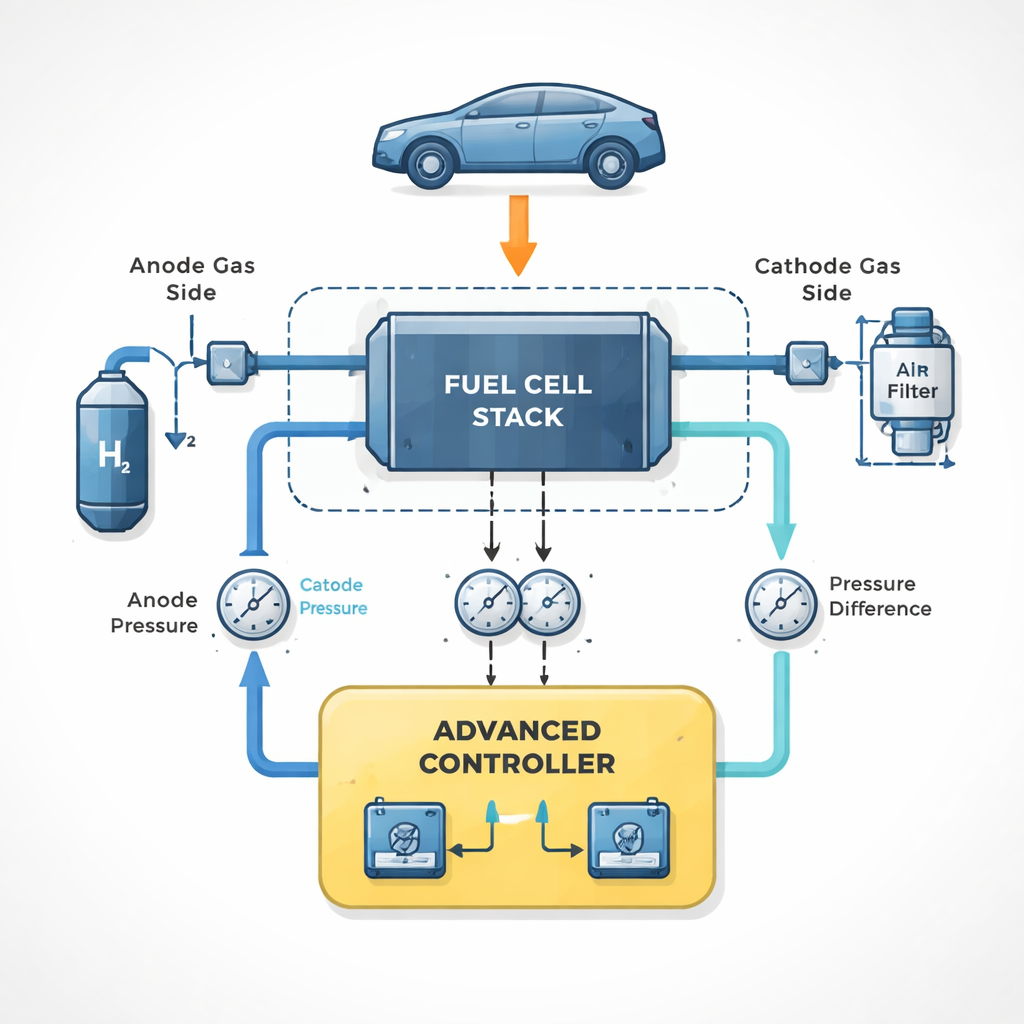
质子交换膜燃料电池(PEMFC)有点像汽车的人工肺:氢气被送入一侧(阳极),空气送入另一侧(阴极)。当氢和氧在薄聚合物膜两侧反应时会产生电能。为了使这一过程既安全又高效,工程师必须精确调节两侧气体的流量和压力。在车辆中,快速加速、制动和净化操作不断扰动这些条件,使阳极和阴极之间的压差上下波动。大幅或频繁的波动会撕裂或使膜疲劳,导致故障和昂贵的更换。
传统控制方法的局限
大多数现有燃料电池系统依赖传统控制方案,如PID(比例—积分—微分)控制器,或更复杂方法滑模控制的基础版本。这些方法可以使平均压力保持在合理范围,但在系统呈高度非线性行为时表现欠佳——尤其是在温度、湿度、气体成分和负载共同变化时。许多早期设计也只关注一种气体(如氧气或氢气),常常忽略阴极中氮气和水蒸气的作用。因此,它们无法充分协调气体流量与压力,很难在所有驾驶条件下保证膜两侧的压差始终保持在小而安全的范围内。
把复杂系统化简为更易处理的形式
作者首先通过建立详细的气体供应系统物理模型来应对这一挑战,追踪燃料电池两侧氢气、氧气、氮气和水蒸气的压力。随后他们应用了一种称为反馈线性化的数学技术。简而言之,这种技术重塑描述燃料电池的方程,使得从控制器角度看,原本复杂的非线性行为开始呈现为两个更“清晰”、近似线性的子系统——一个对应氢气压力,另一个对应氧气压力。这种“解耦”使控制器能够更独立地调整氢气和空气的流量,而不会因一次调整而意外干扰另一侧。
用于压力控制的自适应安全网
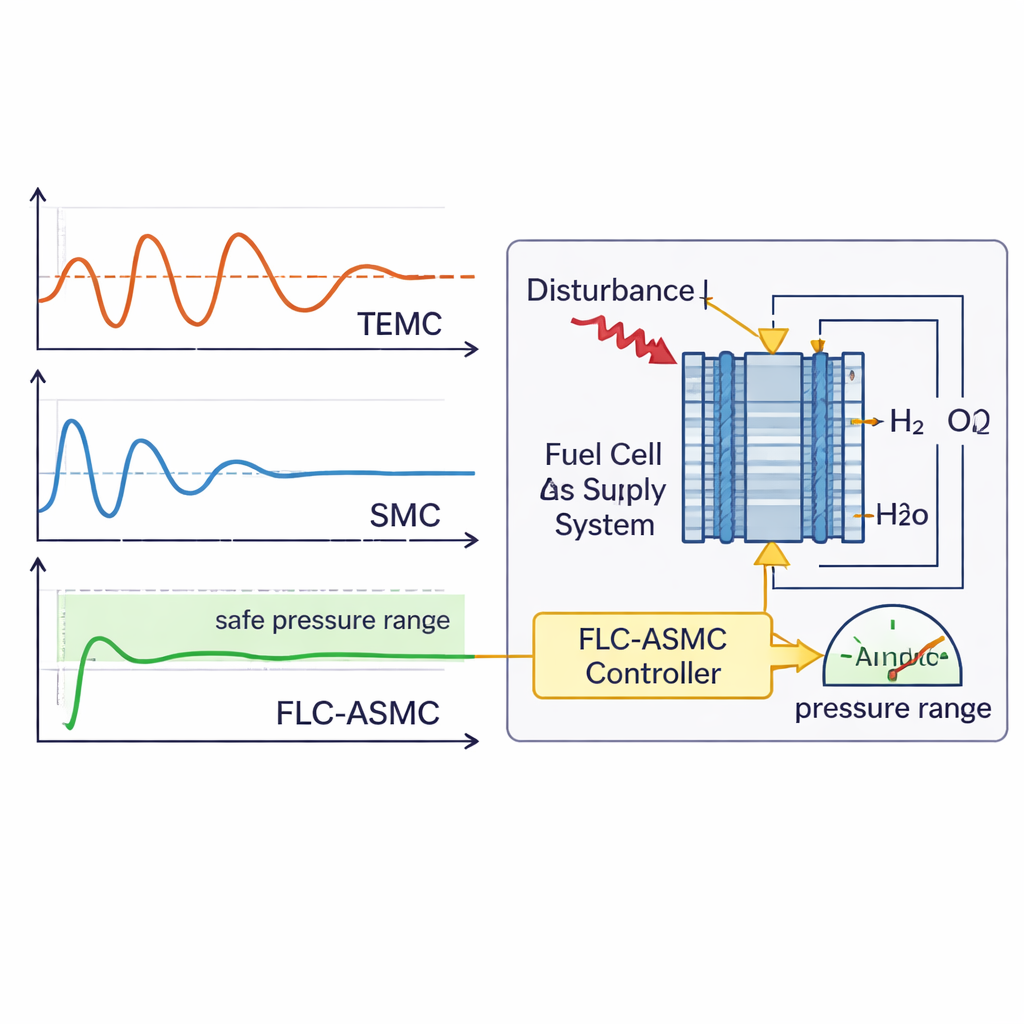
在该解耦模型之上,研究人员设计了一个自适应滑模控制器。滑模控制利用误差空间中的某种目标面,并强制系统沿该面滑动以逼近期望压力,从而对扰动具有较强的鲁棒性。然而,经典方法可能产生颤振——快速开关可能加速阀门或压缩机的磨损。文中所述控制器根据压力误差的大小连续自适应其内部参数,并在一个窄的“边界层”内使切换行为变得更平缓。这种组合(论文中称为FLC‑ASMC)使阳极和阴极压力接近设定点,同时自动补偿未知扰动,如负载突增或小规模建模误差。
新控制器的改进程度如何?
团队在模拟中测试了他们的控制器,模拟了两种车辆场景:负载电流的突变,以及更苛刻的情况——阶跃变化叠加正弦波波动,代表停车起步或不平稳驾驶。他们比较了三种控制器:调校过的PID、经典滑模控制器和提出的FLC‑ASMC。虽然三者都能维持整体堆电压稳定,但在管理膜两侧关键压差方面出现显著差异。PID控制器的跟踪精度约为85%,经典滑模控制将其提高到约90–92%,而新的FLC‑ASMC超过了95%。与其他方法相比,它将稳态时间缩短最多约70%,并将压差超调减小约一半,同时显著降低振荡。
这对未来氢能汽车意味着什么
对非专业读者来说,关键结论是:这种新的控制策略像一个更智能、更具保护性的“呼吸调节器”一样作用于燃料电池车辆。通过解耦并精确管理膜两侧的气流与压力,它在驾驶者要求突然加大动力或路况复杂时仍能将压差保持在安全区间内。这应当转化为更长的燃料电池寿命、更高的可靠性以及对恶劣真实工况的更好耐受性,使氢能交通更接近在日常道路上的实际应用。
引用: Fan, S., Xu, S. Optimal fuel cell control modeling with feedback linearization and adaptive sliding mode control. Sci Rep 16, 5621 (2026). https://doi.org/10.1038/s41598-026-35888-6
关键词: 氢燃料电池汽车, 质子交换膜燃料电池控制, 压差保护, 自适应滑模控制, 反馈线性化