Clear Sky Science · zh
将时间卷积网络算法与通道注意力模块融合用于 UWB 室内定位的应用
为什么在室内寻找人这么难
智能手机、服务机器人和仓库机器人都需要在建筑物内部准确知道自己的位置,即便 GPS 卫星无法覆盖。超宽带(UWB)无线电因能够以厘米级精度测量距离,已成为这项任务的主要候选技术。然而在充满墙壁、玻璃和移动人的繁忙真实场所,这些无线信号经常发生反射、折射或被暂时阻挡,导致报告的位置出现突变。本文探讨了一种基于人工智能的新方法,使 UWB 在这种复杂的室内环境中更为精确和稳定。
拥挤房间里的无线脉冲
UWB 系统通过测量非常短的无线脉冲在标签与多个固定基站之间传播所需的时间来定位设备(称为标签)。在简单开放的空间中,这种“到达时间”方法表现良好。但在室内,信号常常沿着非直接路径传播——在到达接收器前会在门、窗或人身上反射或绕射。这些非视距路径(简称 NLOS)会使标签看起来比实际更远。传统的解决方法依赖精心设计的数学滤波器,或先尝试将每个信号标记为干净或失真的机器学习工具。尽管有一定帮助,这些方法要么过度依赖专家调参,要么在人员不可预测移动时仍难以应对。
让数据随时间讲述故事
研究人员提出了一种不同策略:不是把每次距离读数孤立对待,而是观察读数随时间的变化,让深度学习模型从中学习模式。他们的核心工具是时间卷积网络(TCN),这是一类为时间序列数据设计的神经网络。与按时间步逐一处理的循环网络不同,TCN 使用一维卷积并行地查看较长时间跨度的历史。这种设计避免了常见的训练问题,并使模型能够察觉更长时间尺度的微妙趋势——例如有人走到标签与基站之间时导致测得距离暂时变大,然后又恢复的情况。
教网络注意哪些信息
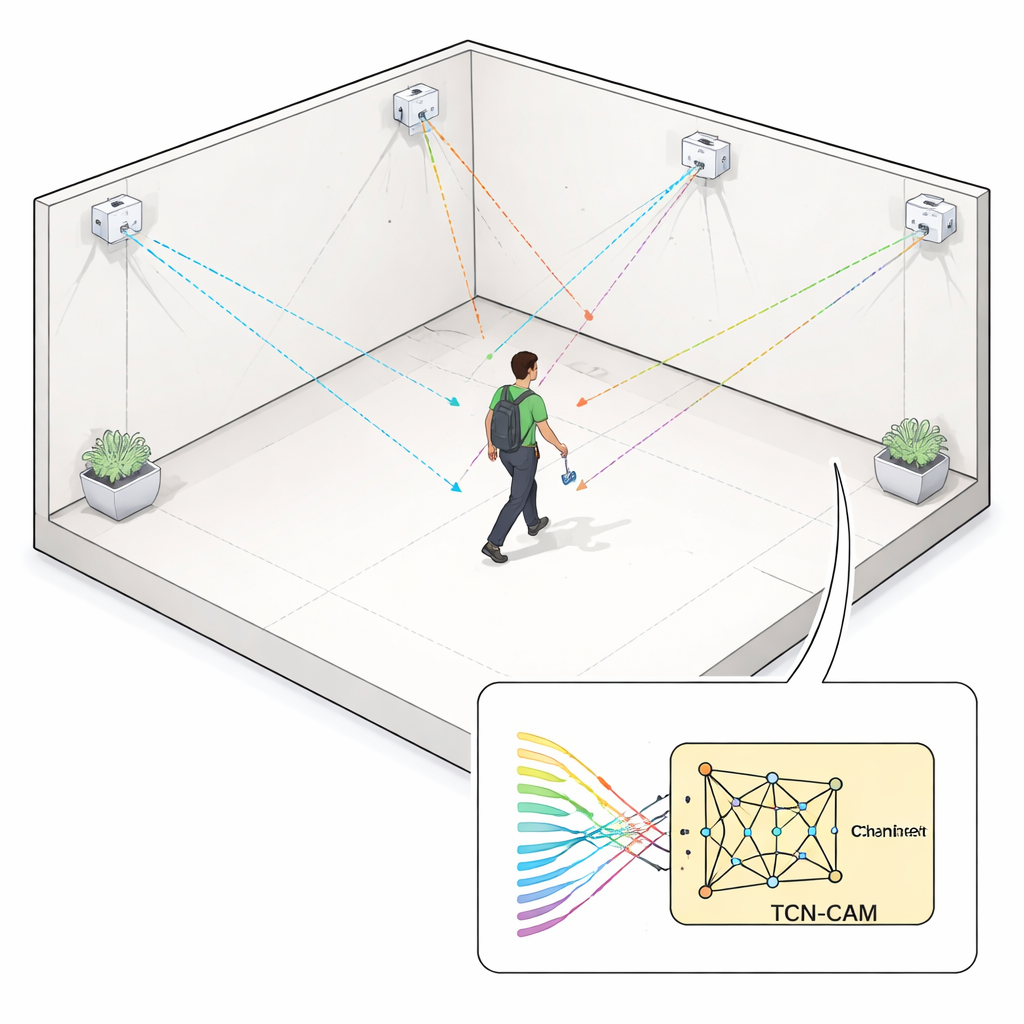
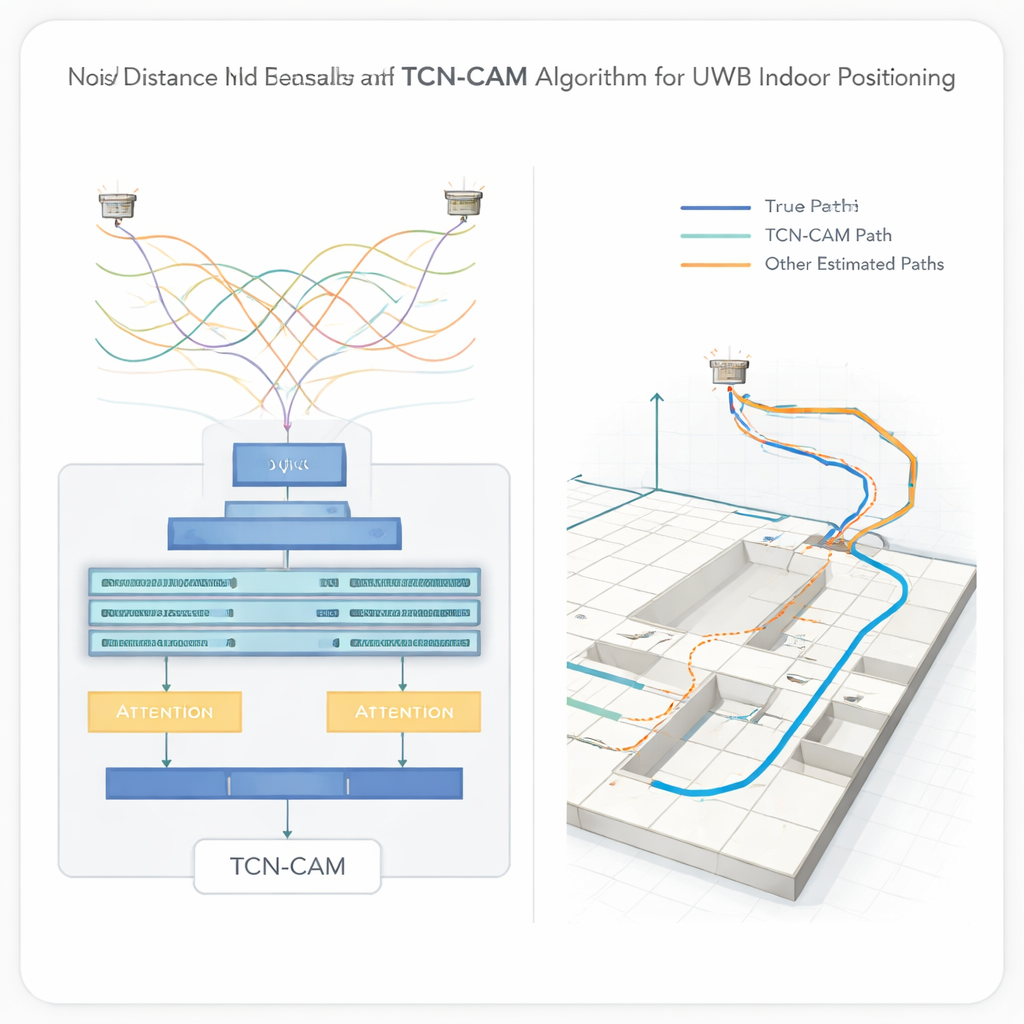
在 TCN 之上,团队加入了通道注意力模块(CAM)。每个基站产生自己的一系列距离读数,而并非在每一刻这些读数都同样可信。CAM 学会为这些通道分配不同权重,提升看似一致的通道,压低那些被反射或阻挡污染的通道。两者结合的 TCN‑CAM 网络将来自六个基站的原始、嘈杂距离作为输入,并在一步端到端的流程中输出标签的三维坐标估计,无需单独的信号分类阶段。
在模拟噪声和真实走廊中的测试
为评估方法性能,作者首先创建了数千个虚拟室内位置,并模拟了具有不同噪声和 NLOS 错误水平的 UWB 测量。他们将自己的 TCN‑CAM 方法与三种对手方法进行了比较:带注意力的长短期记忆网络(LSTM)、标准 TCN,以及带通道注意力的卷积网络。随着模拟干扰增强,各种方法的误差都增加,但 TCN‑CAM 一直产生最小的误差和最窄的结果分布,表明其准确性更高且更可靠。在最苛刻的测试条件下,与其他方法相比,它将平均定位误差大约减少了四分之一到一半。
从实验室到真实移动场景
团队随后在一个真实室内测试场地进行了验证,场地配备了六个 UWB 基站、一台高精度测量仪器,以及刻意走动以造成信号阻挡的人群。新算法对移动标签的定位平均误差仅为 3.32 厘米。与普通 TCN 相比约提升了 19%,比卷积加注意力模型提升了 25%,而比基于 LSTM 的方法则提升了令人印象深刻的 76%。TCN‑CAM 的结果不仅更紧密地聚集在真实轨迹周围,还在每个方向上更忠实地追踪标签的实际三维轨迹。
这对日常技术意味着什么
对非专业读者而言,结论很简单:通过让智能模型观察 UWB 距离读数随时间的变化,并学习在每一刻信任哪些信号,室内定位可以变得更精确且不易跳变,即便当有人移动并阻挡无线路径时亦是如此。虽然如果固定基站移动后方法需要重新训练,但对于基础设施固定的工厂、医院、仓库和智能建筑而言,这提供了一个强大且实用的解决方案。随着类似深度学习技术的成熟并开始与其他传感器融合,各类室内设备很快可能像手机在户外那样可靠地知道自己的位置。
引用: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
关键词: 室内定位, 超宽带, 深度学习, 时间序列分析, 位置跟踪