Clear Sky Science · zh
探索海洋深处:用物联网与集成深度混合学习模型揭示隐藏宝藏
为何海底勘探正迎来高科技升级
深海及其下方的海床隐藏着电缆、管道、古代遗迹和脆弱的生态系统。然而,浑浊的水体、翻滚的沙层和微弱的信号使得观察水下目标出乎意料地困难。本文介绍了一种将多种传感器与人工智能结合的新方法,使水下机器人和监测系统能够更准确、更快速且更省能地识别重要目标。这项工作有助于保护海洋生物、保障基础设施并为勘探开辟新的前沿。
多传感器,构建对深海的统一视图
现有的水下探测设备往往依赖单一感知手段:一次声呐发射、一台摄像机或一种地面传感器。在理想条件下它们表现良好,但在水体变得浑浊、光线减弱或噪声干扰时就会失效。研究者将海洋视为由物联网监视的空间:由小型、联网的设备通过不同方式听、看和感知。他们的系统将来自摄像头、地质雷达、地震振动传感器、热探针和电磁探测器的数据融合成一个用于分析的共享流。通过混合这些视角,即便某一传感器被泥沙、气泡或反射干扰,系统仍能识别出目标。 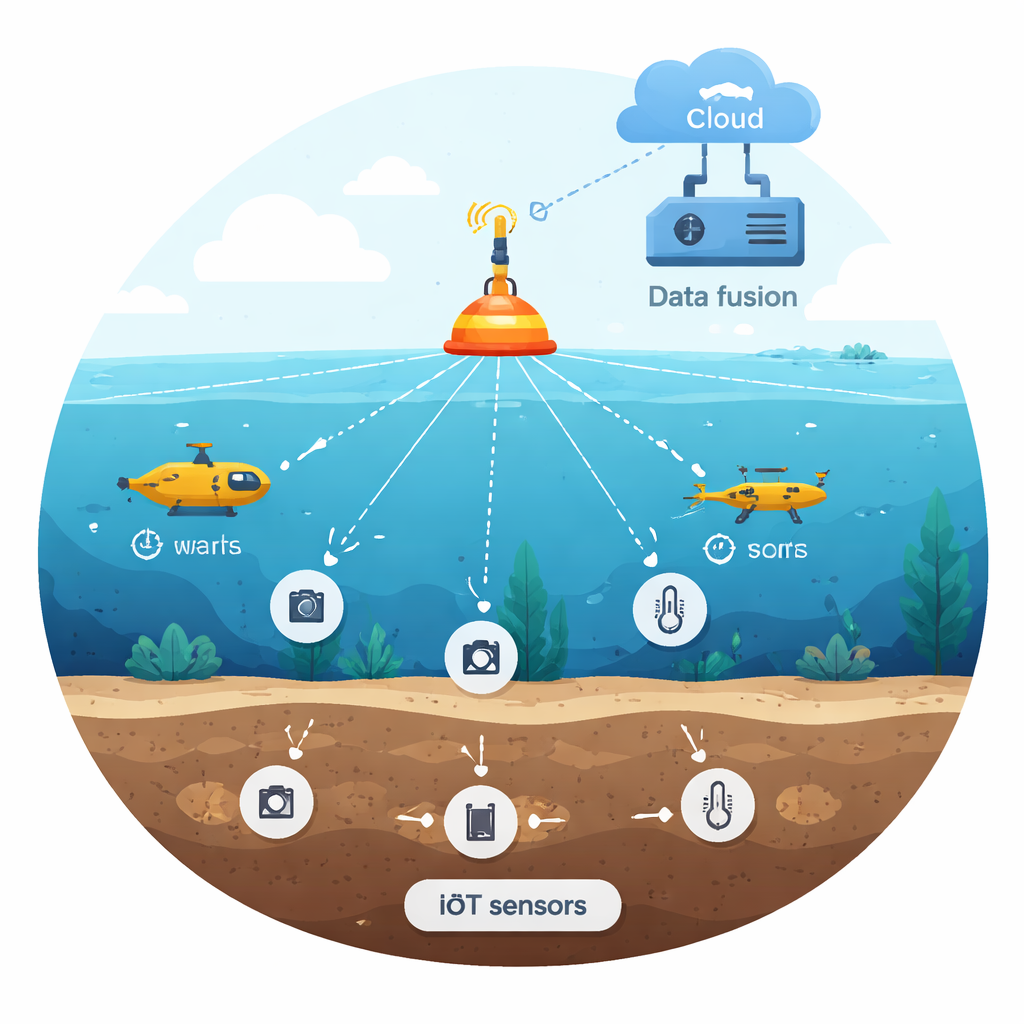
在送入“大脑”前清理杂乱信号
水下采集的原始数据远非完美,常被随机尖峰、缺失和奇异读数所污染,原因包括流动的洋流、活动的生物和电子干扰。在任何智能算法做出判断之前,作者先对这些数据进行严格清洗。他们使用中值滤波去除突发噪声同时保留真实特征,利用统计检验检测并移除离群值,并进行时间同步以使不同设备的读数对齐。他们还对数值进行重标定以避免强传感器掩盖弱传感器,将一维雷达波形转换为图像,并采用现代降维技术将数百个测量压缩为更小且信息更丰富的特征集。所有这些处理都是为了让学习系统看到清晰的图像,而不是混沌的模糊。
既能“看”又能“判”的混合学习引擎
该方法的核心是作者所称的集成深度混合学习(Ensembled Deep Hybrid Learning,EDHL)模型。它由两个互补的部分组成。首先,一种类Inception的深度神经网络充当“眼睛”,在多个尺度上扫描传感器图像,以捕捉电缆等细微结构和岩石露头等较大形态,并由此生成丰富的数值表征。其次,一个梯度提升分类器作为“决策委员会”,通过构建许多小的决策树互相纠错,逐步逼近关于目标类别的正确判断。一个特征选择步骤只保留信息量最大的信号,从而在不丢失关键内容的前提下降低内存占用并加快最终系统的运行速度。 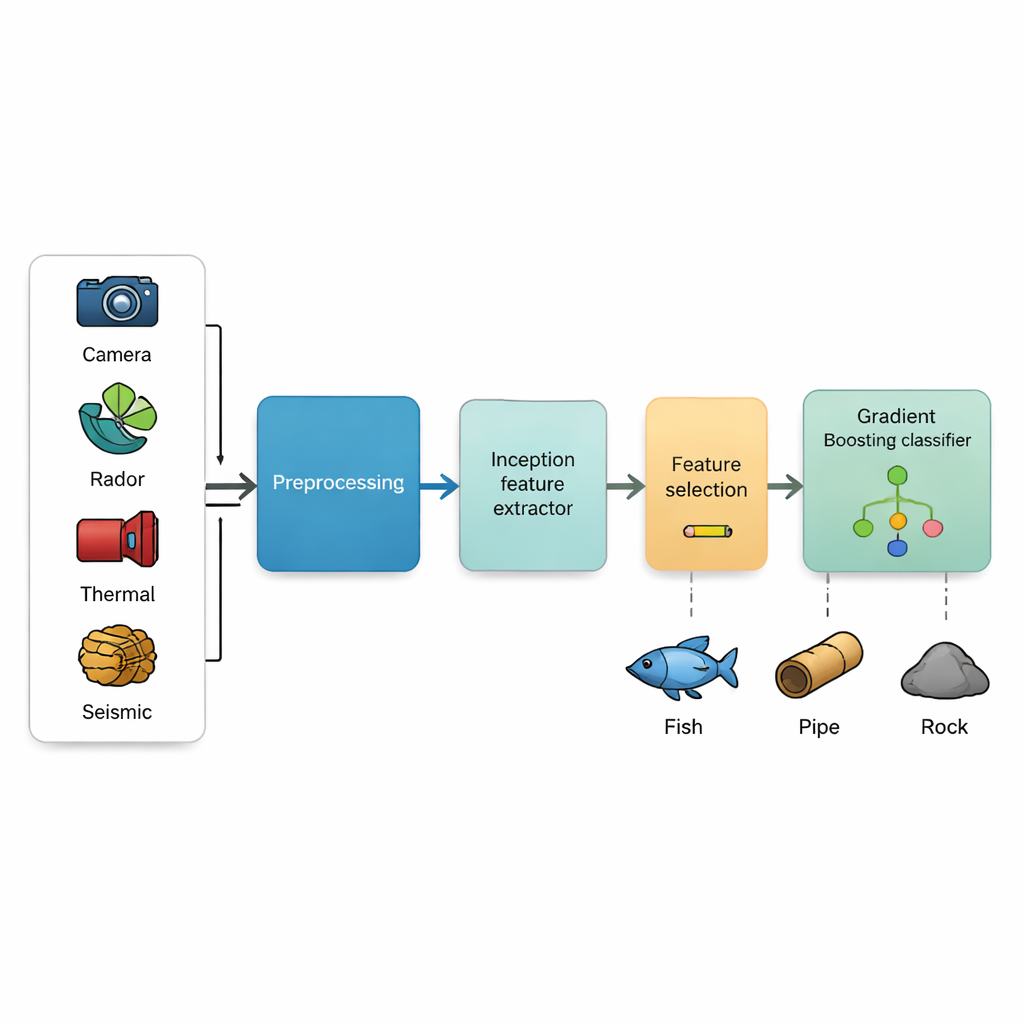
将系统投入测试
为检验他们的设计是否在实践中有效,团队使用包含鱼类、珊瑚、海绵、海藻、贝壳、甲壳类及其他海底场景的大型公开水下图像集对系统进行了训练和评估。他们比较了多种数据清洗与特征选择方案,并将他们的模型与经典卷积网络、ResNet、DenseNet、EfficientNet、胶囊网络乃至基于Transformer的模型等知名深度学习系统进行了对比。结果显示,EDHL结构——尤其在配合细致的噪声去除和基于相关性的特征选择时——达到了超过98%的准确率,误报和漏检远低于竞争模型。重要的是,这一高性能可以在类似边缘设备的中等硬件上保持,而不仅限于强大的实验室服务器。
这对未来海洋勘探意味着什么
对非专业读者而言,结论是作者构建了一个更智能的“感知与推理”系统用于水下世界。通过将多样的物联网传感器与混合学习引擎结合,他们证明了在无需笨重计算设备或完美观测条件下,也能非常可靠地发现和分类海床目标。未来,这类技术可助力水下机器人编队绘制海底图、监测脆弱栖息地、追踪污染并检查埋藏基础设施,从而以更低的能耗和更少的错误将深海这一混乱且恶劣的环境转变为数字感知能够清晰观测并揭示其隐藏宝藏的场所。
引用: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
关键词: 水下目标检测, 物联网传感器, 深度学习, 海洋勘探, 多模态感知