Clear Sky Science · zh
基于微型微控制器的机器学习物体检测与6自由度机械臂控制的设计与实现
更智能的机械臂、更低的成本
想象一下这样一台工厂机械臂:它能识别物体、决定如何抓取并平滑移动到位——而无需依赖笨重的计算机或云连接。本文正是描述了这样的系统:一台六关节(6-DoF)机械臂,使用体积小且低成本的微控制器进行感知与决策。对于关心人工智能如何走出数据中心并进入日常设备的读者来说,这项工作展示了先进的视觉与控制如何在不比USB棒大多少的硬件上运行。
为何缩小“机器人大脑”很重要
传统工业机器人常依赖强大的外部计算机来识别物体并规划运动。这增加了成本、布线和技术复杂性,可能成为中小企业的门槛。作者的目标是证明:单个廉价微控制器几乎可以完成所有任务——看见物体、判断其在三维空间中的位置、规划机械臂的运动并驱动执行任务的电机。将处理留在板载,使系统更便携、更节能,也更易于在空间受限或环境多变的场景中部署,从小型工厂到教学实验室均适用。
一台可自造的灵活机械臂
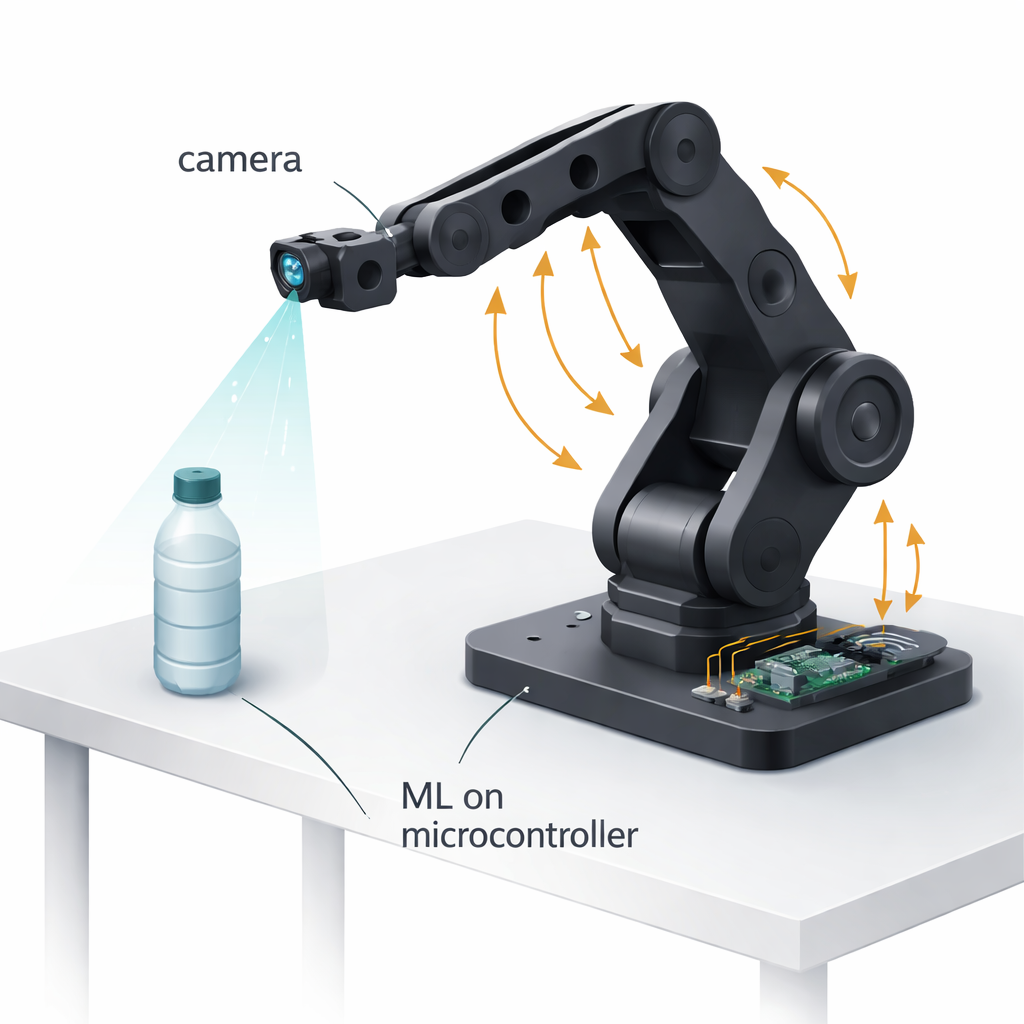
团队从头设计了一台六关节机械臂,主要使用3D打印塑料部件以保持轻量和低成本。每个关节由高扭矩的消费级伺服电机驱动,研究人员对这些电机进行了改造以实时读取其精确角度,从而实现精确的闭环控制。末端的自制两指夹爪内置简单的电流传感器:通过监测夹爪电机的电流大小,系统可以推断夹持力度并自动调整,以在不压碎也不掉落物体的情况下牢固抓取。安装在“腕部”的小型全高清摄像头随臂移动,为系统提供从夹爪视角看到的场景画面。
教一颗微芯片识别水瓶
系统视觉的核心是流行物体检测网络 YOLOv7-tiny 的紧凑版本。研究团队在超过2500张塑料水瓶图像上训练该模型,图像涵盖了多种光照角度、距离和部分遮挡情况。经由强大的显卡训练后,他们将模型压缩为8位的“微型ML”形式,以便适配内存和计算能力受限的 AMB82-Mini 微控制器。即使在这种精简形式下,模型在检测水瓶上的准确率仍约为88%,并能以每秒约7–8帧的速度运行,足以在微控制器上实现实时的抓取与放置工作,而无需PC或云协助。
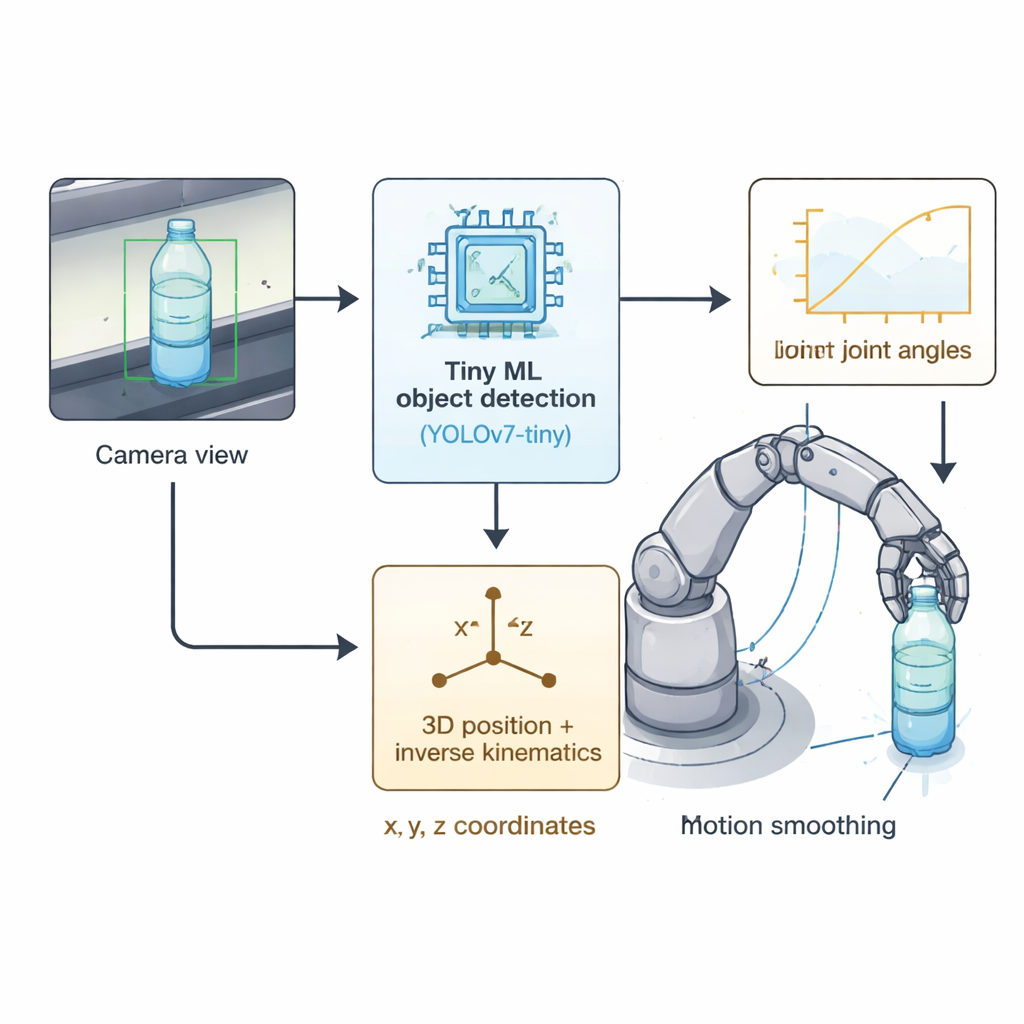
从像素到精确运动
摄像头识别到水瓶后,系统计算检测框在图像中的中心,并根据物体在像素中的大小估算其距离。这些信息转换为空间中的 x、y、z 坐标。随后,定制的数学求解器将这些坐标映射为机械臂必须达到的六个关节角,采用标准的机器人几何方法并针对在微处理器上快速运行进行了优化。控制软件以简单的状态机组织,循环执行寻找物体、移动到位、利用电流传感器作为触觉闭合夹爪、然后将物体运送到固定放置点。为保持动作平滑并避免抖动,团队采用精心设计的运动“缓和”曲线以及一种特殊的电压调制方法,以减少电机颤振和超调。
实测结果与启示
在反复试验中,集成系统能够可靠地抓取并放置最高达300克的塑料水瓶,成功率为100%,在更重负载(最高500克)下仍表现良好。仿真和测量表明,定位误差通常约为一毫米——足以应对许多分拣与包装任务。与更简单的控制方案相比,作者提出的电机控制策略减少了振动、缩短了臂体稳定所需时间,并消除了突发抖动。尽管测试集中在一种物体类型和受控的室内固定距离环境,但这些结果有力地表明:严肃的机器人感知与控制可以被压缩到一块非常朴素的嵌入式板上。
这对日常自动化意味着什么
对非专业读者来说,主要结论是:先进的“看见”和“移动”能力不再局限于昂贵的大功率机器人。通过在低成本微控制器上结合微型机器学习模型、智能几何学和精细的电机控制,这项工作展示了一条通向紧凑、独立机械臂的道路,小型制造商、学校和爱好者都有望采用。随着未来版本扩展到更多物体类型和更复杂的环境,类似的嵌入式系统可能会在不知不觉中自动化无数简单的抓取与放置任务,让智能机器人触达更多人群和场所。
引用: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
关键词: 嵌入式机器人, 微型机器学习, 机械臂控制, 物体检测, 工业自动化