Clear Sky Science · zh
预测性利用环境规律需要与行动相关
这对日常移动为何重要
日常生活充满了我们在移动中做出的决策:踏入斑马线、选在人多走廊的哪一侧行走,或在繁忙的商店里穿梭。我们很少拥有完备信息,但常常表现得仿佛“知道”接下来很可能会发生什么。本研究探讨的是人们何时会把环境中隐含的模式用于提前规划动作,何时又在最后时刻才选择反应式应对。
在虚拟博物馆中的一次漫步
为研究这个问题,研究者在虚拟现实中建造了一座小型艺术博物馆。志愿者佩戴 VR 头显,在一个与虚拟空间匹配的真实房间中行走。每次试验中,他们从博物馆一端出发,需要尽可能快速且直接地到达对面墙上的两扇门之一,同时要避开中央展台和一个会移动的保安。保安会突然从左侧或右侧出现并挡住其中一扇门。在多次试验中,保安更常挡住某一侧,但参与者并未被告知这一点;他们必须靠自身经验去发现这种趋势。

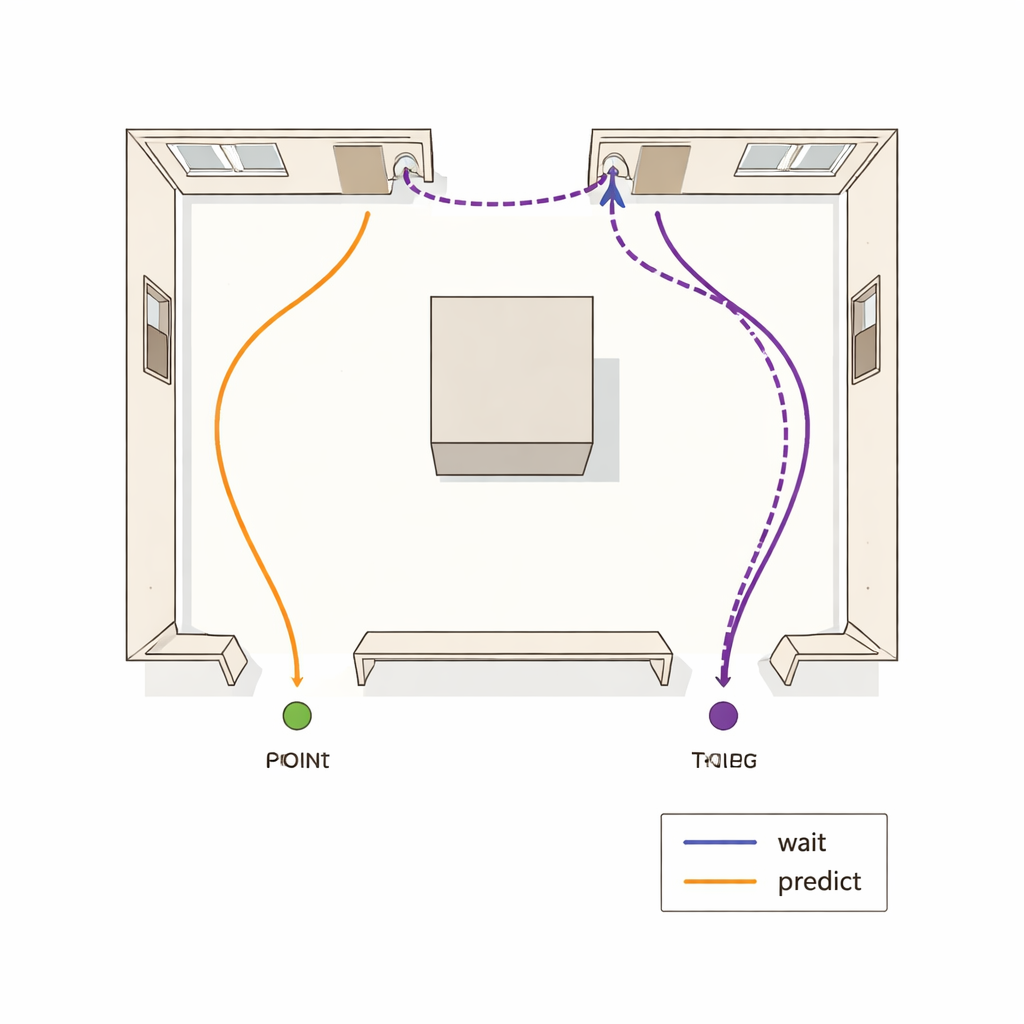
何时等待比预测更安全
在第一个实验中,布局允许人们从中间直线行走并将选择推迟到保安出现时再做决定。许多参与者采用了这种“观望”策略:他们向前走时几乎没有侧向移动,只有在看到哪扇门被挡住之后才做出急剧修正。对身体位置的仔细分析显示,随时间平均向统计上较安全一侧的偏移很小,而其中大部分效应来自少数“超级学习者”。聚类分析揭示了不同风格:大多数是延迟决策的“观望者”,少数是做出适度预测位移的“中等学习者”,一人表现出强烈的预测行为,还有一些表现更随机。眼动追踪显示,随着对房间熟悉,参与者的凝视确实有所集中,但变化幅度有限且个体差异很大。
提前选择带来回报
第二个实验改变了环境的一个关键特征。更大的中央障碍迫使两条路径更早分岔,因此参与者不得不在保安出现之前很久就决定向左或向右。选择被挡的路径代价很高:他们必须掉头并返回再尝试另一侧。在这种新条件下,几乎所有人很快学会了在每个试验区块中哪一侧通常是畅通的,并开始提前选择那一侧。他们的选择模式与一个从试验到试验更新期望的理想数学学习者的行为非常接近。换言之,当任务使得提前决策既必要又有利时,人们会迅速捕捉到隐含规律并用来指导他们的动作。
目光看向路径,注意力关注任务
在两个实验中,眼动数据讲述了一个更为微妙的故事。参与者逐渐减少了对场景的扫视范围,随着对虚拟博物馆的熟悉,他们的凝视变得更窄更集中。然而,这些变化与保安位置是否可预测并没有强烈关联。相反,这些变化更像是对环境熟悉度增长和个体观看风格差异的体现,而不是学习特定概率的明确标志。
这对现实世界导航意味着什么
这两项实验表明,人们并不总是将他们能从周围环境中学到的东西用于提前规划。即便存在可用的模式,许多人也会在晚些时候才等待明确的感官证据,尤其是在迟反应代价低且安全时。当提前承诺是必要且错误代价高时,预测性规划才变得突出。换言之,我们在世界中的移动不仅反映了我们所知道的内容,还反映了环境如何奖励或惩罚提前决策。因此,对环境规律的预测性利用并非自动发生,而是由任务要求、付出代价与个人策略共同塑造的一种适应性选择。
引用: Kretzmeyer, B., Rothkopf, C.A. & Fiehler, K. Predictive use of environmental regularities requires action relevance. Sci Rep 16, 1596 (2026). https://doi.org/10.1038/s41598-026-35500-x
关键词: 运动计划, 虚拟现实导航, 预测性行为, 具身决策, 统计学习