Clear Sky Science · zh
利用无人机 SfM 与 LiDAR 点云开发溪流水面 DTM 生成方法
为什么绘制河床很重要
河流不仅仅是输送水体。河道、沙洲和河岸控制洪水、创造野生动物栖息地,并影响污染物如何向下游移动。然而,要精确绘制河床及其周边地形却出乎意料地困难,尤其是在浅水且植被繁茂的溪流中,船只、声纳和持杆测量人员往往难以到达。该研究展示了低空飞行无人机、激光扫描仪和智能计算过滤器如何协同工作,生成韩国一条溪流的详尽“裸地”地图,为河流隐秘形态提供更安全、更快速且更完整的视图。
复杂溪流上空的新视角
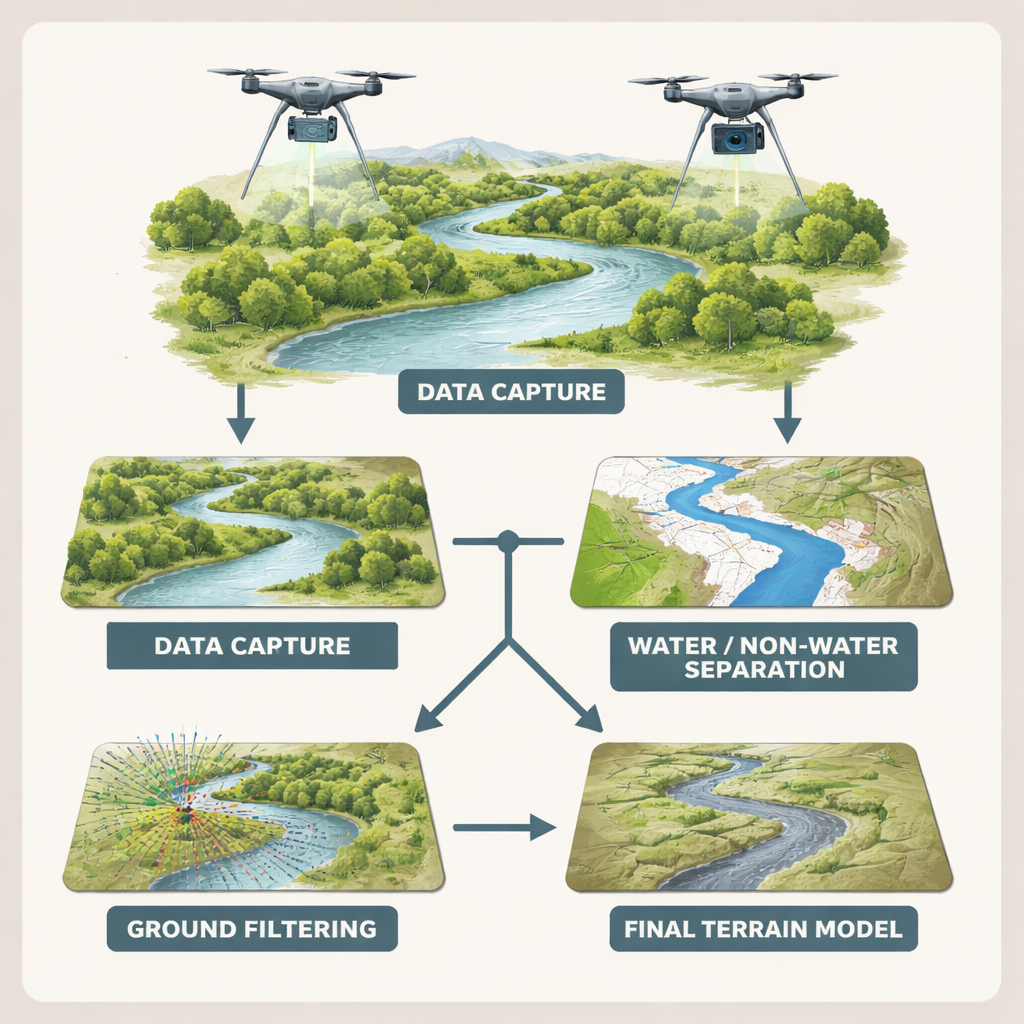
研究者将目标放在韩国利川市博河溪(Bokha Stream)一段长约2.8公里的河段,该地形包含弯曲河道、沙洲、洪泛平原和高大的河岸植被。传统测量在这里既慢又危险,且无法捕捉所有弯曲与凹陷。团队改用两类无人机:一架搭载激光扫描仪(LiDAR),发射光脉冲并测量其返回时间,生成能够穿透树冠到达地面的高密度三维点云;另一架装有多光谱相机,采用结构光法(SfM)将多张重叠照片拼接为另一个三维点云。两种互补的数据源共同覆盖了植被茂密的河岸和较浅、较清的河道。
将水体与陆地、地面与杂物分离
原始三维点云记录一切:树叶、树枝、建筑物、空气噪声以及在波动水面上的反射。为了仅建模真实地形,需要剔除这些额外点。团队首先用一种基于颜色的简单指标——归一化水体差异指数(NDWI)来区分水体与陆地,该指数比较图像中绿光与近红外波段的亮度。超过设定阈值的像素被标记为水域。在陆地区域优先使用 LiDAR 点,因为激光脉冲可以穿过叶隙到达土壤;在水域,由于 LiDAR 多数只在水面反射、无法探测水下深度,研究者转而依赖基于照片的 SfM 数据,后者在浅且相对清澈的水中有时能追踪到河床特征。
检验三把数字扫帚
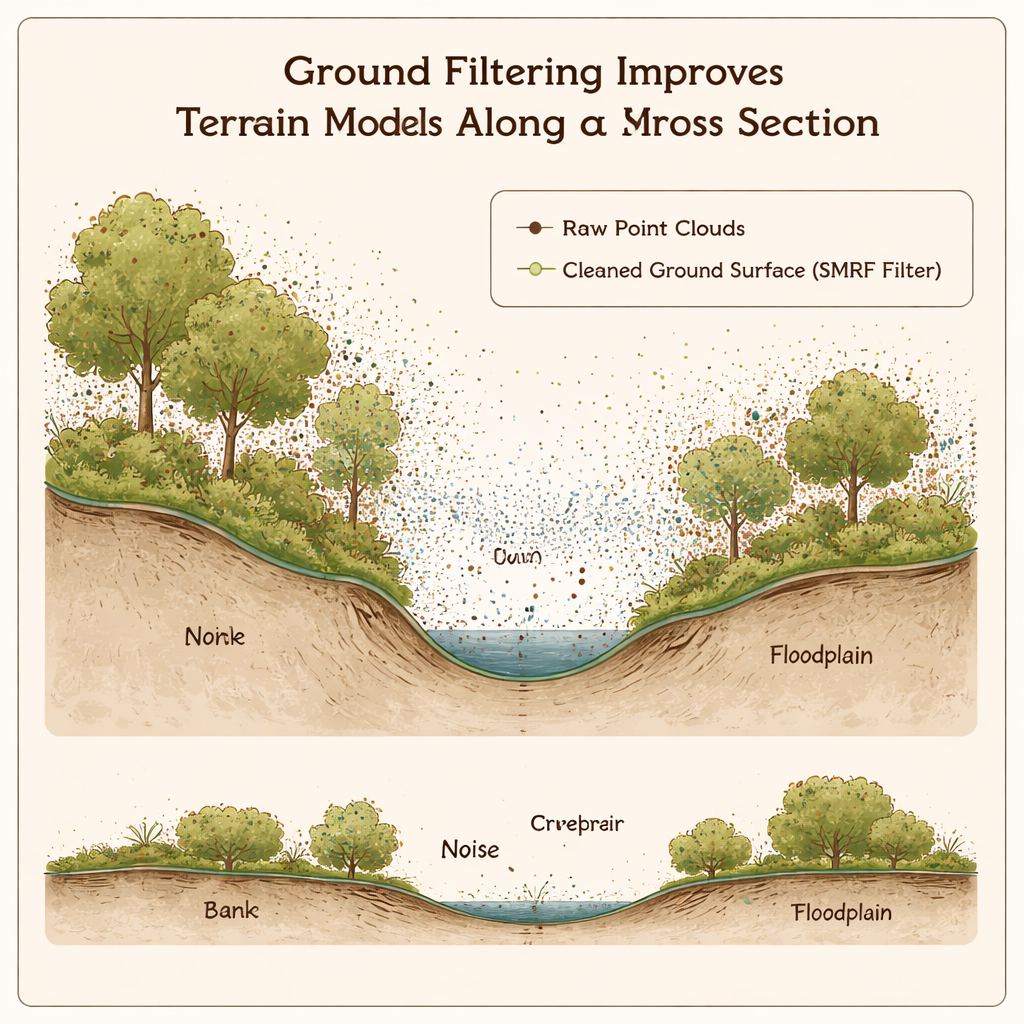
下一步更具挑战:在保留河岸与河床真实形态的同时,剔除植被和其他非地面物体。团队比较了三种广泛使用的“数字扫帚”——地面滤波算法。布料模拟滤波器将点云倒置,想象一块柔性布覆盖其上,布的下表面视为地面。渐进三角网(TIN)滤波器从低点逐步构建网格表面,按高度与坡度规则逐步加入点。简单形态学滤波器(SMRF)通过反复腐蚀与膨胀处理表面,修剪灌木和树木等高物体。针对每种方法,研究者测试了多组参数,分别为陆地上的 LiDAR 与水域中的 SfM 调整,随后将生成的地形与用传统测量仪器在11处精确测得的剖面进行比对。
找到与真实河流最匹配的方法
精度通过建模高度与实测高度之间的平均差和均方根差来评判。单独使用 LiDAR 或 SfM 时,基于照片的方法总体表现更好,因为它能部分捕获 LiDAR 无法探测的淹没河床。但当两套数据结合使用时,结果最为清晰:陆地区使用 LiDAR,水域使用 SfM,并对两者应用优化的滤波器。在三种算法中,SMRF 整体表现最佳,整个区域的误差仅在约16到21厘米量级。它在去除密集灌木和高大树木方面表现出色,同时能保留诸如小阶地和陡岸等尖锐地形特征,这些特征对逼真洪水与栖息地模型十分关键,尽管在水域有时略微低估了高度。
对河流与其周边的意义
从实用角度看,本研究提供了一套经验证的流程,能将杂乱的无人机测量数据转化为小型浅溪的精确裸地地图。通过自动分离水陆并智能融合激光与影像数据,该方法克服了传统船载或地面调查的许多盲点。作者认定 SMRF 为这种混合河廊的最可靠通用滤波器,同时指出布料模拟滤波器在含有坏点的复杂水域中表现尤其稳定。这些见解可以帮助工程师与生态学家构建更好的洪水模型、规划修复工程并追踪河流随时间的变化,同时降低现场风险与成本。随着更环保的激光系统和改进的处理技术普及,该方法有望使高分辨率河床制图成为管理水道的常用工具。
引用: Gou, J., Lee, H., Park, J. et al. Development of a stream DTM generation methodology using UAV-based SfM and LiDAR point cloud. Sci Rep 16, 5178 (2026). https://doi.org/10.1038/s41598-026-35473-x
关键词: 河流制图, 无人机测量, LiDAR, 数字地形模型, 河流生态学