Clear Sky Science · zh
基于 YOLOv8-EST 的煤矿工作面状态检测
地下更聪明的“眼睛”
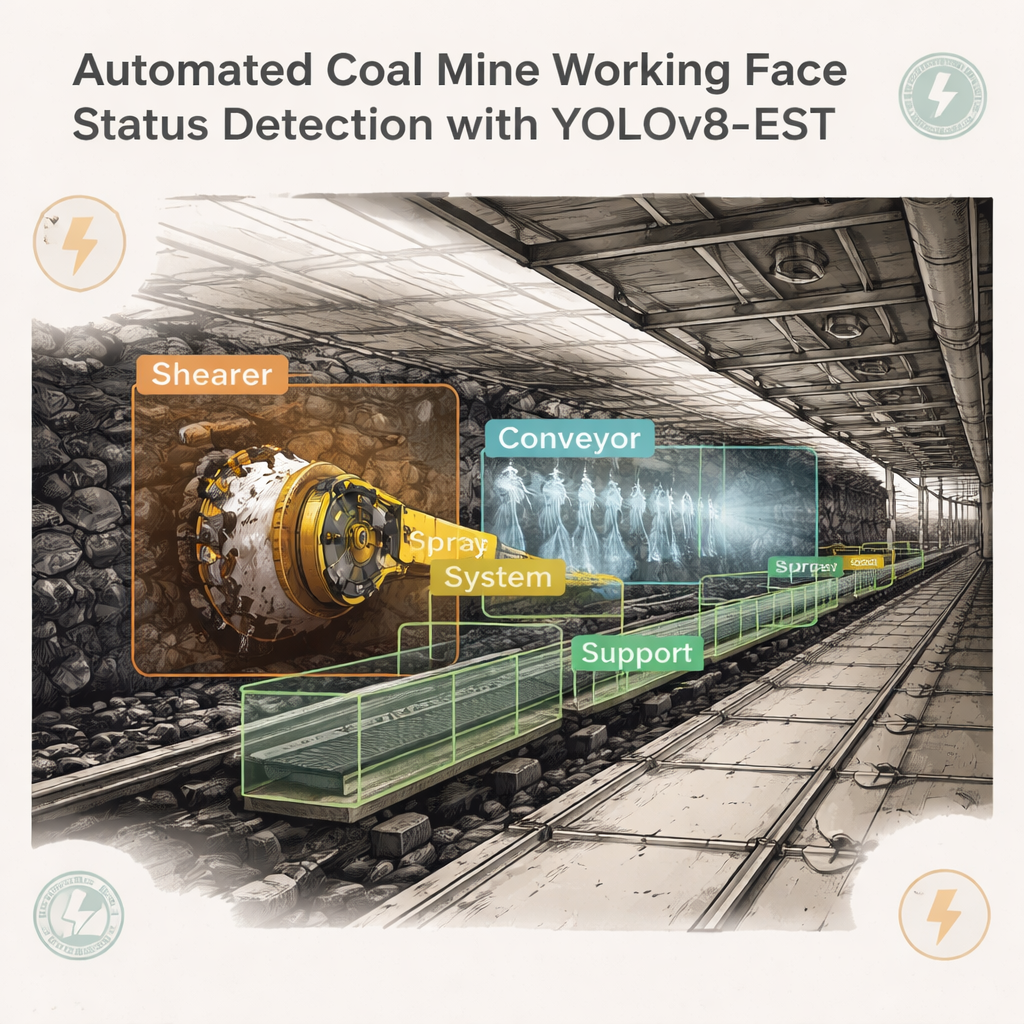
现代煤矿在昏暗多尘的巷道中部署了强大的机械设备,人眼可见性差、安全余量有限。本研究提出了一种新的人工智能系统,称为 YOLOv8-EST,旨在持续“监视”工作面——即正在采掘的煤层区域——并自动判断关键设备是否工作正常。该系统在对现场有限计算资源的条件下实现快速且高精度的判断,目标是在不依赖大量高端服务器的情况下提升安全性和生产效率。
为何监控工作面很重要
中国是世界上最大的煤炭生产国,其矿井面临更高的安全、环保和效率要求。在全机械化工作面上,旋转切割鼓从煤层切下煤块,刮板和皮带输送机将其运走,喷雾系统用于抑尘。如果这些组成部分中的任何一项失效或出现异常,都会导致产量下降并增加事故风险。传统监测高度依赖工人经验和简单传感器,但在弱光、浮尘、眩光以及移动设备频繁遮挡的条件下,这些方法常常力不从心。作者将“工作面状态检测”定义为仅基于视频图像实时识别这些关键部件的正常与异常状态,这是一条通往真正智能矿井的可行路径。
现有矿井视觉识别的局限
近年来基于 AI 的目标检测取得了显著进展,尤其是像 YOLO(You Only Look Once)这类快速系统。这些模型能在极短时间内识别并标注图像中的多个目标。然而,大多数精度提升来自网络更深更重的设计,这对工作面通常有限的计算能力提出了更高要求。像 Faster R-CNN、RetinaNet、EfficientDet 及基于 Transformer 的系统虽然精度高,但在恶劣且动态的地下环境中往往过于缓慢或资源密集。此外,标准模型并未针对矿井中特有的视觉问题进行专门优化——诸如强烈对比、旋转飘散的粉尘、设备的部分遮挡以及不断变化的背景等。
轻量但强大的检测引擎
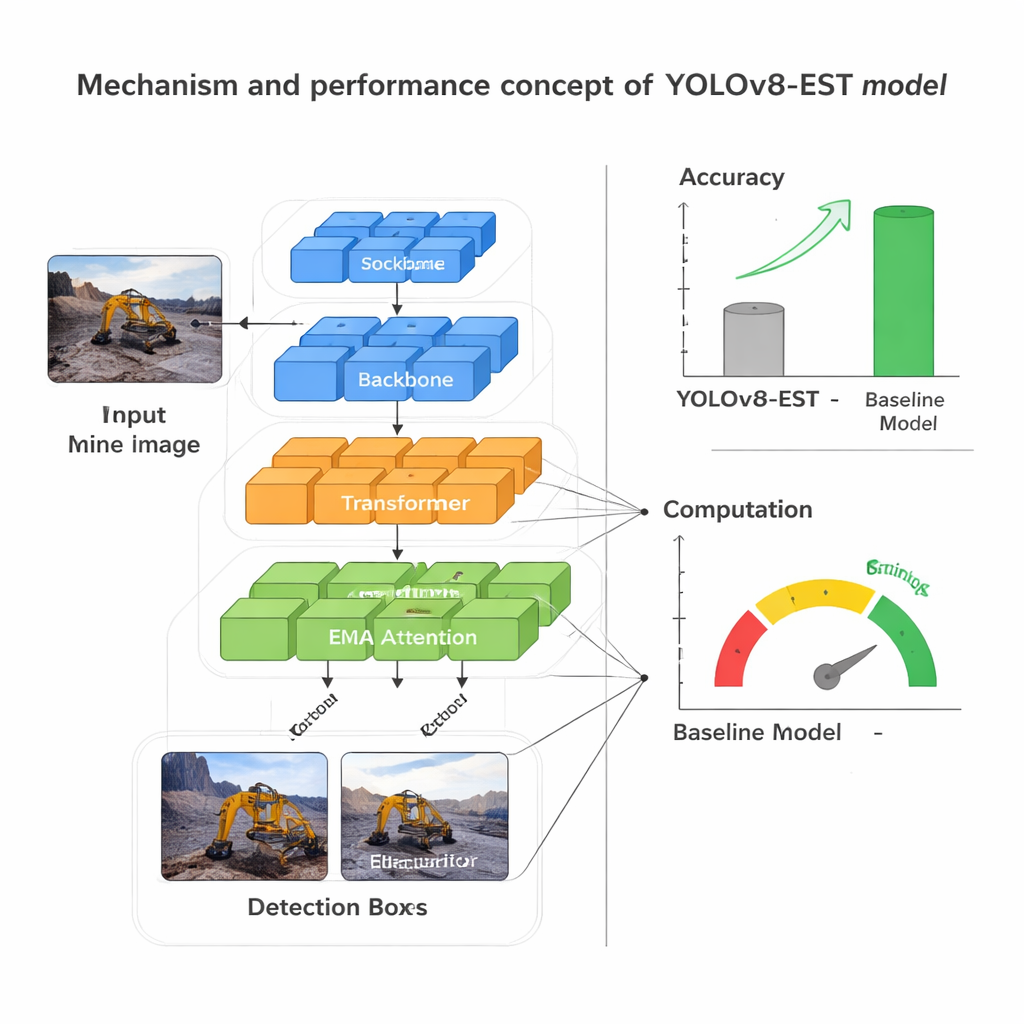
为应对这些约束,研究者在实时检测器 YOLOv8 的基础上进行针对性改造,形成了 YOLOv8-EST。核心思路是在不显著膨胀模型体积的前提下加入更智能的特征处理模块。首先,他们引入了 Swin Transformer 模块——在小图像窗口及其位移窗口内使用注意力机制,以同时捕捉局部细节与更长范围的模式,例如输送线的形状或采煤机机身的轮廓。其次,通过用一个小型深度网络生成相对位置编码,替代简单的线性公式,改善了模型对空间关系的理解,从而帮助判断例如喷雾是否与切割鼓正确对齐。第三,他们引入了一种修改后的激活函数 GELUS,该函数在数学上针对矿井图像中常见的低对比、噪声信号进行了平滑而高效的响应调优,在保持学习稳定性的同时减少计算开销。最后,EMA 注意力模块采用指数移动平均策略混合当前与过去的特征信息,帮助网络聚焦真正重要的区域并抑制噪声和闪烁的背景。
系统测试
研究团队构建了来自一个全机械化工作面、命名为 CM 的专用图像数据集,包含 10,862 张图像。场景涵盖机体、切割鼓、刮板输送机、皮带输送机和喷雾系统,在不同光照与粉尘条件下采集。数据被划分为训练、验证和测试子集,并按弱光/高粉尘、中等和正常条件分组以测试鲁棒性。使用常规性能指标——精确率、召回率和平均精度均值(mAP)——他们将 YOLOv8-EST 与轻量模型(如 YOLOv3-tiny、SSD-Mobilenetv2)、主流 YOLOv5 和 YOLOv8、较重的两阶段检测器(Faster R-CNN、RetinaNet)以及基于 Transformer 的设计(DETR、RT-DETR)进行了比较。综合测试显示,YOLOv8-EST 实现了最佳平衡:精确率和召回率约为 98%,mAP 非常高,同时模型保持紧凑,足以在单张工业级显卡上实现实时运行。
对矿井安全的意义
对非专业读者而言,关键结论是本研究能将地下原始、模糊的视频转化为对关键采矿设备的可靠自动状态报告。YOLOv8-EST 可以在全天候、近人工水平的准确度下提示输送机停转、切割鼓偏离位置或喷雾系统失效等问题,替代工人持续目视监控那些布满灰尘和运动模糊的暗屏。通过将现代 AI 技术精心适配以在工作面高效运行——而非仅在远端数据中心——该系统为更安全、更稳定、更智能的煤炭生产提供了切实可行的路径。
引用: Wang, H., Wu, G., Yang, Q. et al. Working face status detection in coal mine based on YOLOv8-EST. Sci Rep 16, 7787 (2026). https://doi.org/10.1038/s41598-026-35452-2
关键词: 煤矿安全, 目标检测, 计算机视觉, 深度学习, 工业自动化