Clear Sky Science · zh
用于基于PMSM的电动汽车应用的一种新型自适应神经模糊与自适应比例谐振控制方案
更安静、更平顺的电动出行
电动汽车本已比燃油车更清洁,但电机的控制方式仍有改进空间。油门响应突兀、来自电机的轻微嗡嗡声以及能量浪费,都可以追溯到电机对道路与交通变化的响应速度与平滑度。本文探讨了一种从内部“驾驶”电机的新方法——结合人工智能与特定频率信号整形——以使电动汽车加速更平顺、能量损失更少,并能更好地应对真实工况扰动。
为什么在真实道路上电机控制很重要
现代电动汽车常用永磁电机,因为它们体积紧凑、效率高,并能在起步时提供较大牵引力。但城市驾驶情况复杂:司机在红绿灯处停车起步、在拥堵中穿行,面临坡道与负载变化。在这些工况下,电机转速可能超调或滞后于驾驶者的期望,轴上的力矩会出现脉动。那些脉动表现为振动、噪声,并给齿轮和轴承带来额外应力。传统控制回路依赖固定的调节参数,仅在一小部分工况下表现良好,当道路、温度或车辆负载发生变化时就会吃力。
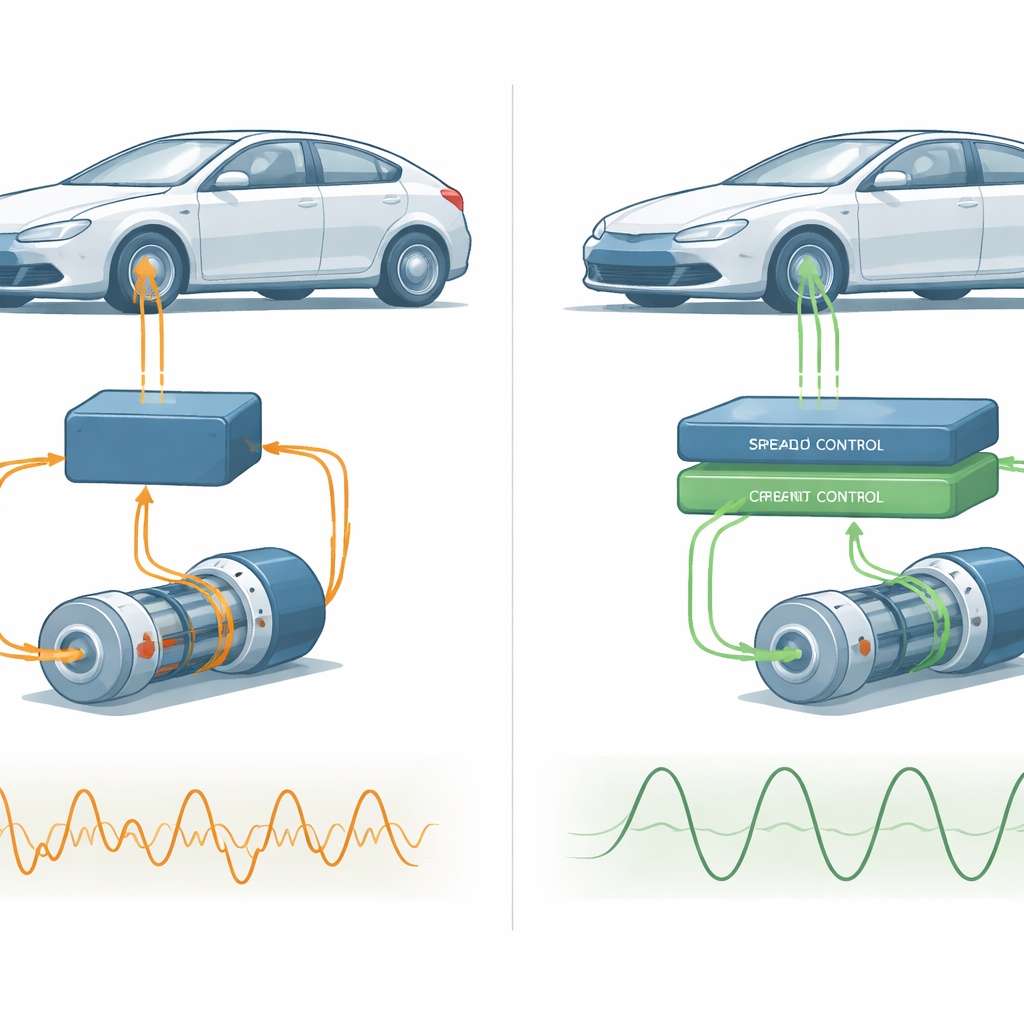
将学习与规则结合以改进速度控制
作者用一种自适应神经‑模糊系统替代了常见的外环速度控制单元——这种控制器把模糊逻辑的“如果—那么”规则与神经网络的学习能力结合起来。它不是在工厂中一次性手工调好,而是通过样本数据学习电机转速对指令和扰动的响应。该控制器将原始的速度误差(实际转速与目标转速之差)及误差变化率转换为一组重叠的“意见”,然后将它们融合为精确的校正量。训练与测试结果表明,这一学习型控制器能快速找到能减少过冲与欠冲的参数,缩短达目标转速的时间,并在系统非线性或参数变化时保持稳定性。
整形电流以实现平稳低噪运转
在外环决定电机应转多快的同时,内环决定每一瞬间流入线圈的电流大小。在这里,作者引入了一种自适应比例谐振控制器。该控制器不仅对误差幅值作出反应,还专门关注电机主交流频率处的电流分量——那些频率处的不良脉动最具破坏性。通过精心选择若干关键调节值,它在该基频处提供很高的校正增益,同时避免在其他频率引入不稳定。结果是电流波形近似理想正弦,尖锐波动大幅减少,从而降低了转矩脉动和可闻的啸叫声。
将新策略付诸测试
团队通过详细的计算机仿真和硬件在环实验评估了他们的两级设计——外环的神经‑模糊速度控制与内环的谐振电流控制,仿真与实验模拟了真实电动汽车的传动系统。他们将其与三种已有方法进行了比较:常规的比例—积分控制器、将该控制器与谐振内环配对的方案,以及一种模型预测方法。在一系列工况下——静止起步、负载下的稳态运行、恒负载下的快速速度变化以及恒速下的突变负载——新方案始终更快达到目标转速,峰值与谷值更小。即使在人为改变电机电阻与电感以模拟升温或恶劣环境时,它也能产生更平顺的转矩和更清洁的电流波形。
对未来电动汽车的意义
简单来说,这种混合控制策略让电机能够“思考”并自适应,而不是盲目遵循固定配方。通过在速度层面学习如何抑制扰动,并在电机内部塑形电流波形,该方法减少了振动、噪声和能量浪费。对驾驶者而言,这意味着更平顺的加速、更稳定的巡航,以及在零部件老化和天气变化下更具容错性的传动系统。虽然该方法在某些部分仍假设了固定的工作频率,但结果表明,向电机驱动中引入智能化与频率感知控制,可能是迈向更精细、更耐用、更高效电动汽车的重要一步。
引用: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
关键词: 电动汽车电机, 神经模糊控制, 永磁同步电机, 转矩脉动抑制, 先进电机驱动