Clear Sky Science · zh
基于超扭转算法的描述子T‑S模糊系统模糊滑模控制
让复杂系统服从控制
从管理鱼类种群到维持电网和电子电路的稳定,许多现实系统表现出复杂的非线性行为。工程师使用高级控制算法在遭受干扰和不确定性时仍能保持这些系统的安全与高效。本文提出了一种新的控制策略,以更平滑的方式驯服这些难控系统,避免了可能损坏设备并降低性能的剧烈快速切换。
为什么有些系统难以控制
许多实际系统不仅由描述量随时间变化的微分方程决定,还伴随必须始终满足的代数约束。这类所谓的描述子系统出现在经济学、电力网络、机械联动和生物模型中。为处理它们的非线性行为,研究人员常使用Takagi–Sugeno (T‑S) 模糊模型,将复杂系统表示为在不同工作区域有效的若干线性子模型的混合。尽管这种框架功能强大,但长期以来存在一个技术障碍:大多数控制方法假定事先知道模糊“隶属函数”如何随时间变化,然而这些变化实际上依赖于系统及其控制器未知的未来行为。
一种更平滑的鲁棒控制
滑模控制是一种广受欢迎的鲁棒控制方法,因其能迅速将系统拉入期望轨迹并在干扰下保持该轨迹而著称。它通过以对抗不确定性的方式切换控制输入来实现这一点。然而,快速切换会导致“抖动”——高频振荡,这在机械和电气系统中是不受欢迎乃至有害的。超扭转算法作为滑模控制的一种更高级形式,将切换隐藏在内部过程中,生成连续的控制信号,在保持鲁棒性的同时减小抖动。直到现在,这种技术主要局限于单输入系统或需要将多输入系统分解为多个独立控制器,这在计算上代价高昂。
一种无隐含假设的新型滑模面
作者的第一个关键贡献是为描述子T‑S模糊系统专门设计的一种新型“积分”滑模面。简单来说,该滑模面是一个同时涉及系统当前和累积过去行为的数学条件。通过巧妙构造该滑模面,作者证明一旦系统到达该面,就能保证期望运动,而无需事先对模糊隶属函数变化的任何界限假设。这去除了限制早期方法的一项苛刻假定。分析采用精心选择的类能量函数来证明系统在滑模面上的行为随时间保持稳定。
多变量超扭转控制器
在此滑模面的基础上,论文提出了超扭转算法的多变量版本。该方法不是为每个输入或每个滑模变量设计单独的控制器,而是以矩阵形式处理所有变量。这样更适合状态之间强耦合的系统,例如生态系统中相互作用的物种或电路中的电流与电压。作者推导出选择控制增益的条件,使得系统状态立即到达滑模面并在有限时间内收敛。由于控制信号是连续的而非尖锐切换,抖动从设计上得到抑制,同时对干扰的鲁棒性得以保留。
在生物学与电子学中的验证
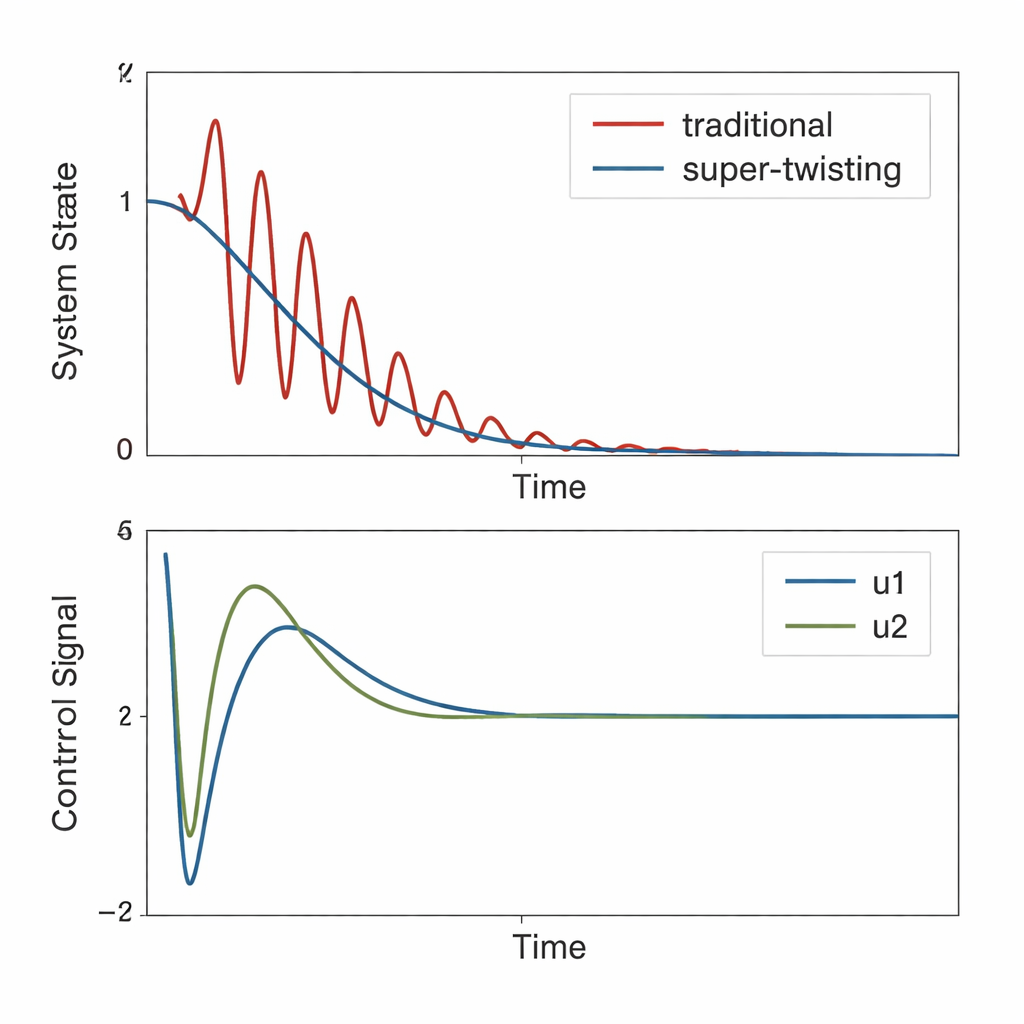
为证明方法的可行性,作者将其应用于两个不同的非线性描述子系统。第一个模型描述了一个生物经济情景,涉及幼体和成体种群,以及反映生殖能力和管理动作(如捕捞与调控)的变量。第二个例子是非线性隧道二极管电路,这是电子学中的经典试验平台。在两种情况下,仿真结果表明所提控制器能迅速稳定系统状态并将滑模变量保持在接近零的水平,表明对期望行为进行了精准跟踪。与传统滑模控制器相比,新方法显著降低了系统响应和控制信号中的振荡。
实践意义
对非专业读者而言,主要信息是:这项工作提供了一种在不采用那些会导致剧烈切换的鲁棒方法的前提下,仍能控制复杂、有约束且存在不确定性的系统的方法。通过结合模糊建模、积分滑模面与多变量超扭转算法,作者设计的控制器在数学上被证明是稳定的,并在操作上更为平滑。这可能有利于从生态资源管理到先进功率电子和网络控制系统等应用领域,尤其是在未来将这些思想扩展到通信可能被攻击中断的网络安全场景时。
引用: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
关键词: 滑模控制, 模糊系统, 鲁棒控制, 非线性动力学, 超扭转算法