Clear Sky Science · zh
用于三自由度平面机械臂的鲁棒模型参考自适应控制器
让机器人臂更智能以应对更艰难的任务
工厂中的机器人臂速度极快且精度高,但当现实世界出现偏差时——载荷变化、零件位置略有不同或意外力作用于臂体——其性能会下降。本文探讨了一种新方法,使常见的三关节机器人臂在难以精确建模且存在强扰动的情况下仍能保持准确性和稳定性,从而让机器人在车间里更可靠。
三关节为什么对实际工厂很重要
研究聚焦于三连杆平面机器人:三个刚性连杆由旋转关节连接,在平面内运动。尽管结构简单,这种布局是许多工业拣放、包装线和装配系统的基础。挑战在于,一个关节的运动会强烈影响其他关节,描述臂运动的方程高度非线性且耦合紧密。传统控制器在一切已知且可预测时效果良好,但当机器人载荷变化、摩擦或质量模型不准确,或外部扰动将臂偏离轨迹时,它们会遇到困难。
把复杂运动拆成更简单的部分
为驯服这种复杂性,作者首先推导了机器臂运动的详细数学模型,包含连杆质量、关节角度与重力如何共同产生运动。随后他们提出了一个关键简化:"解耦"策略。不将机器人视为一个纠结的三关节系统,而是将每个关节建模为其加速度主要依赖于自身电机转矩和速度。剩余影响——例如关节间相互作用、重力项和其他难以建模的影响——被归为不确定性加以处理。此解耦使控制问题可分解为三个更小、更易处理的子系统(每个关节一个),同时仍承认真实系统底层存在复杂性。 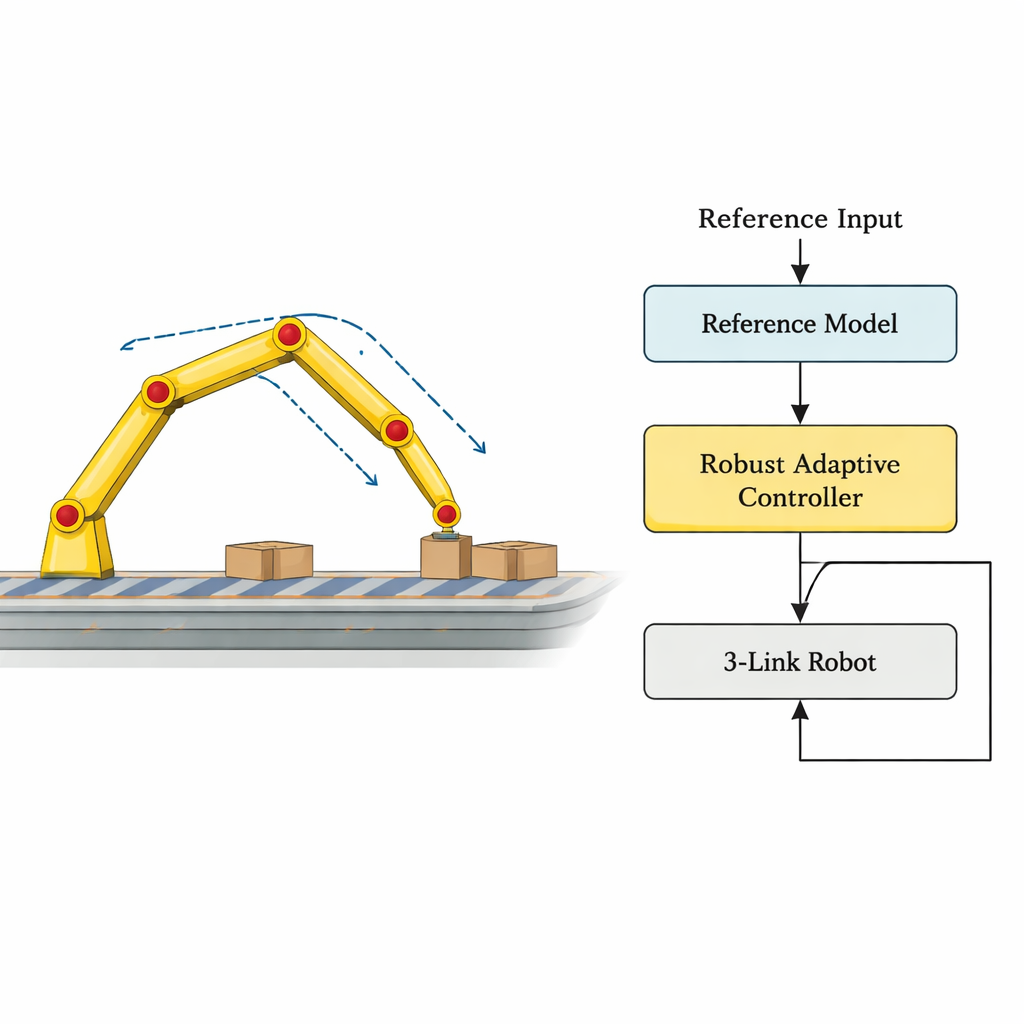
教机器人跟随移动目标
在此简化模型之上,作者构建了模型参考自适应控制器(MRAC)。通俗地说,他们先定义了理想响应——一个参考模型,说明当给出命令时每个关节应如何随时间运动。控制器不断比较机器人实际运动与该理想响应,并实时调整内部增益以减小差异。在理想条件下,常规MRAC可以使机器人紧跟参考,但它有一个严重弱点:在持续扰动或建模误差存在时,自适应增益可能漂移到极端值,导致振荡、能量浪费甚至稳定性丧失。这种现象称为参数漂移,使得普通MRAC在实际工业应用中存在风险。
让自适应变得鲁棒而非鲁莽
为避免这种漂移,论文开发了若干显式考虑未知影响的“鲁棒”MRAC变体。作者在自适应律中加入额外项,温和地把控制器增益拉回到安全范围,或根据跟踪误差的大小调整自适应力度。在所测试的策略中——称为西格玛修正(sigma-modification)、误差修正(error-modification)以及考虑能量的最优控制修正(energy-aware optimal control modification)——最后一种表现突出。通过大量计算机仿真,包括快速振荡路径、拣放运动、50%质量变化、突加载荷以及强高频扰动,鲁棒MRAC使机器人的跟踪误差保持较小且控制信号平滑。在常规MRAC内部增益无界增长的情形下,鲁棒版本使其保持良好行为并维持臂运动稳定。 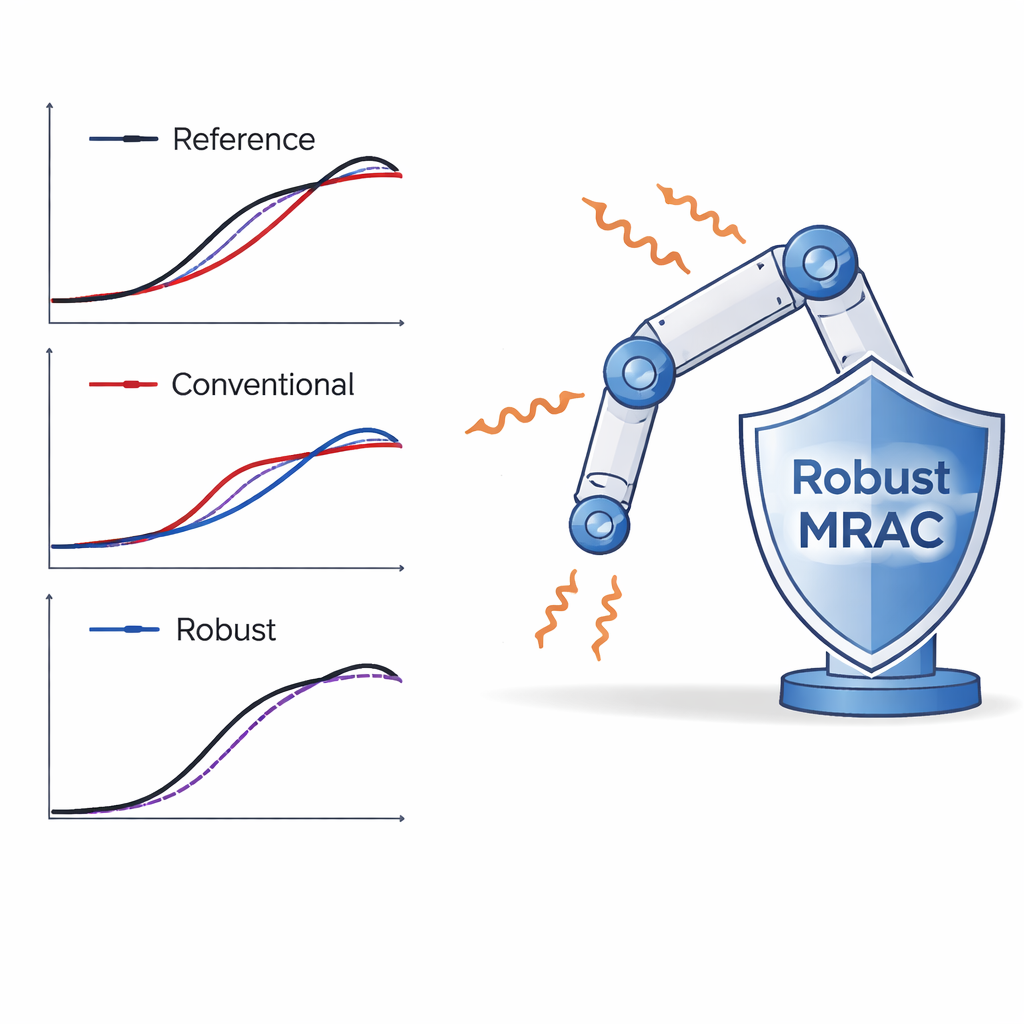
这对真实世界机器人意味着什么
对非专业读者而言,结论是这项工作提供了更智能的工业机器人“自动驾驶”——能够持续学习和适应,但在环境或载荷变化时不会变得不稳定。通过将复杂的三关节动力学拆分为更简单的部分,并在学习过程中加入保障措施,所提出的鲁棒自适应控制器可使机器人在扰动和不确定性下仍能准确跟随期望路径并采用合理的电机努力。这使实际机器人向真正即插即用的系统更进一步,能够快速重新任务、应对突发情况,并在无需专家频繁重新调试的情况下安全地与人类并肩工作。
引用: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
关键词: 机械臂控制, 自适应控制, 工业机器人, 轨迹跟踪, 鲁棒控制