Clear Sky Science · zh
一种用于少样本个性化步态周期生成与重建的元学习框架
为什么我们的行走方式很重要
我们走的每一步透露的信息比想象的要多。一个人的步态可以提示其身份、健康状况、情绪,甚至疲劳程度。然而,捕捉这些微妙模式通常需要大量数据和冗长的实验室测试。本文提出了 MetaGait,一种基于人工智能的新方法,能够仅凭少量示例学习某人的独特行走风格,从而在临床、机器人和虚拟现实中使个性化运动分析与辅助变得更可行。
从平均步态到个体步伐
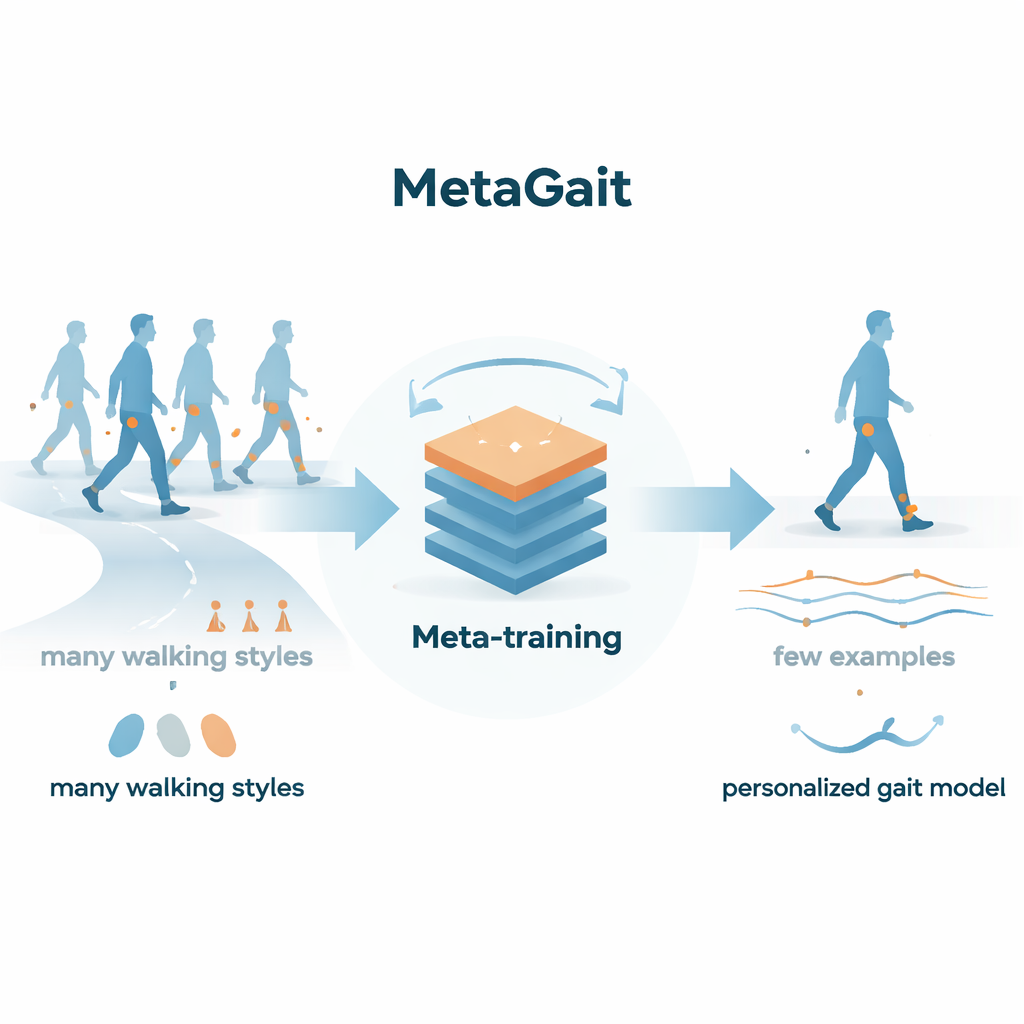
传统的行走计算模型在学习人群“平均”运动方式方面非常擅长,但对决定个体差异的细节常常束手无策。以往系统通常需要针对每个人的大量数据来微调模型以匹配其特定风格,这既昂贵又耗时。MetaGait 通过将个性化本身视为一个学习问题来应对这一挑战:它不仅学习人们如何行走,还学习如何快速学习新个体的行走方式,所需的记录步态样本极少。
从众多步行者中学习如何学习
为此,研究者采用了一种称为元学习的策略,常被描述为“学习如何学习”。他们利用了人类步态数据库,该数据库包含数千个由附着于小腿的微型运动传感器在不同条件下记录的步态周期,覆盖 200 多名受试者。MetaGait 在诸如“适应受试者 A”或“从噪声数据重建受试者 B 的步态”之类的小任务上反复训练。对于每个小任务,系统获得一个极小的支持集——几条记录的步态周期——来调整其内部参数,然后在同一人的新周期上进行测试。经过大量此类任务的训练,MetaGait 发掘出一个内部起点,只需一到五个示例周期就能迅速微调以适应新个体。
用于时序运动的智能引擎
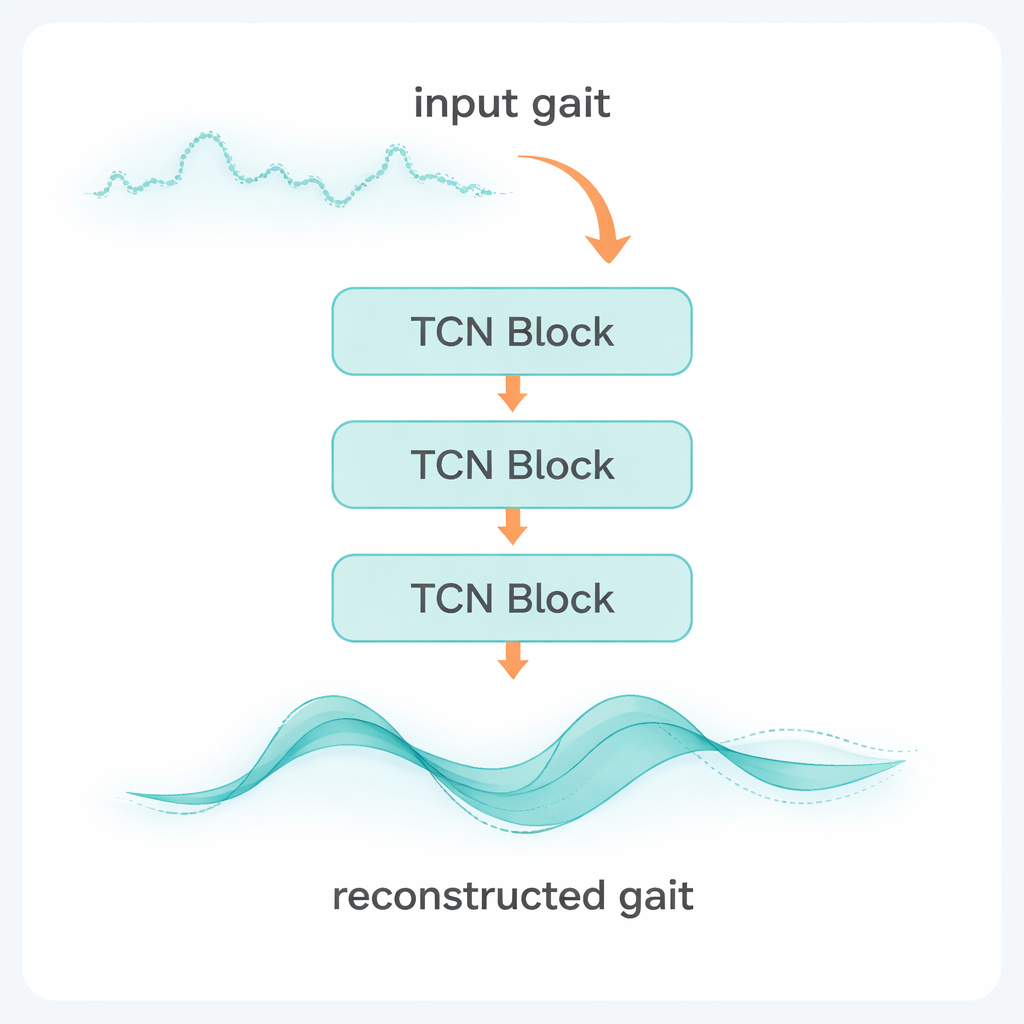
MetaGait 的核心是一个时序卷积网络,这是一类专为处理随时间展开的序列而设计的神经网络。该网络处理传感器读数——例如来自小腿安装设备的加速度和旋转数据——每个步幅包含 100 个时间步。在一种模式下用于生成:给定某人少量干净示例,它会生成一个新的、逼真的步态周期以匹配该人的风格。在另一种模式下用于重建:在给定部分损坏或有噪声的步态信号以及少量干净示例的情况下,它能够恢复完整、干净的周期。在元训练期间,网络参数在嵌套循环中被调整,使得在新数据上进行少量微调步骤就足以将其专门化到新的受试者上。
在有限数据条件下测试系统
团队在严格的“少样本”场景中评估了 MetaGait,其中模型在被要求生成或重建更多步态之前仅看到来自新个体的一条或五条步态周期。他们将其与两种常见基线方法比较:使用仅有的少量示例从头训练模型,和在大量数据上预训练通用模型然后微调。使用运动序列的标准准确性度量,MetaGait 在生成和重建任务上均持续比任一基线产生更准确、更自然的步态模式。它不仅能更好地填补缺失片段和去除噪声,而且在此过程中保持个体风格。
这在日常生活中可能意味着什么
对非专业读者而言,关键结论是:MetaGait 表明我们可以用非常少的个人数据构建个性化的行走模型。这可以加快机器人外骨骼或义肢的调试速度,帮助临床医师在无需长时间测试的情况下评估步态问题,并使虚拟角色在简短校准后就能模仿其人类用户的动作。尽管仍需进一步工作以提高训练效率并在真实世界部署中检验该方法,但该研究展示了通向快速、准确且高度个性化步态分析的有希望路径。
引用: Yadav, R.K., Nandi, A., Sharma, D.A.K. et al. A meta learning framework for few shot personalized gait cycle generation and reconstruction. Sci Rep 16, 5506 (2026). https://doi.org/10.1038/s41598-026-35121-4
关键词: 步态分析, 个性化运动, 元学习, 可穿戴传感器, 人体运动