Clear Sky Science · zh
基于历元先验退火的植物生长点定位
为饥饿世界提供更智能的除草方法
随着全球人口增长,农民面临着在使用更少化学品并保护环境的同时产出更多食物的压力。一项主要挑战是如何在不伤害有价值作物的前提下去除杂草。本文介绍了一种新的人工智能(AI)训练策略,帮助机器精确定位植物的生长点——即植物生长的起始位置,使激光或电力除草等工具能够外科般精确地处理杂草,同时保护作物不受伤害。
生长点为何重要
杂草会抢夺作物的阳光、水分和养分,降低产量并威胁粮食安全。农民常依赖除草剂,但过度使用会带来健康、污染与抗性杂草等问题。火焰、电力和激光除草等新技术通过机械或能量束摧毁植株,承诺提供更清洁的控制手段。要安全有效,这些系统必须先区分作物与杂草,然后定位那些通常位于茎结处的微小生长点,在这些位置造成损害最为有效。许多现有的计算机视觉工具能检测整株植物,但它们在快速且准确地找到这些小目标以满足田间实时应用方面仍然有困难。
将简单的颜色线索转化为强有力的引导
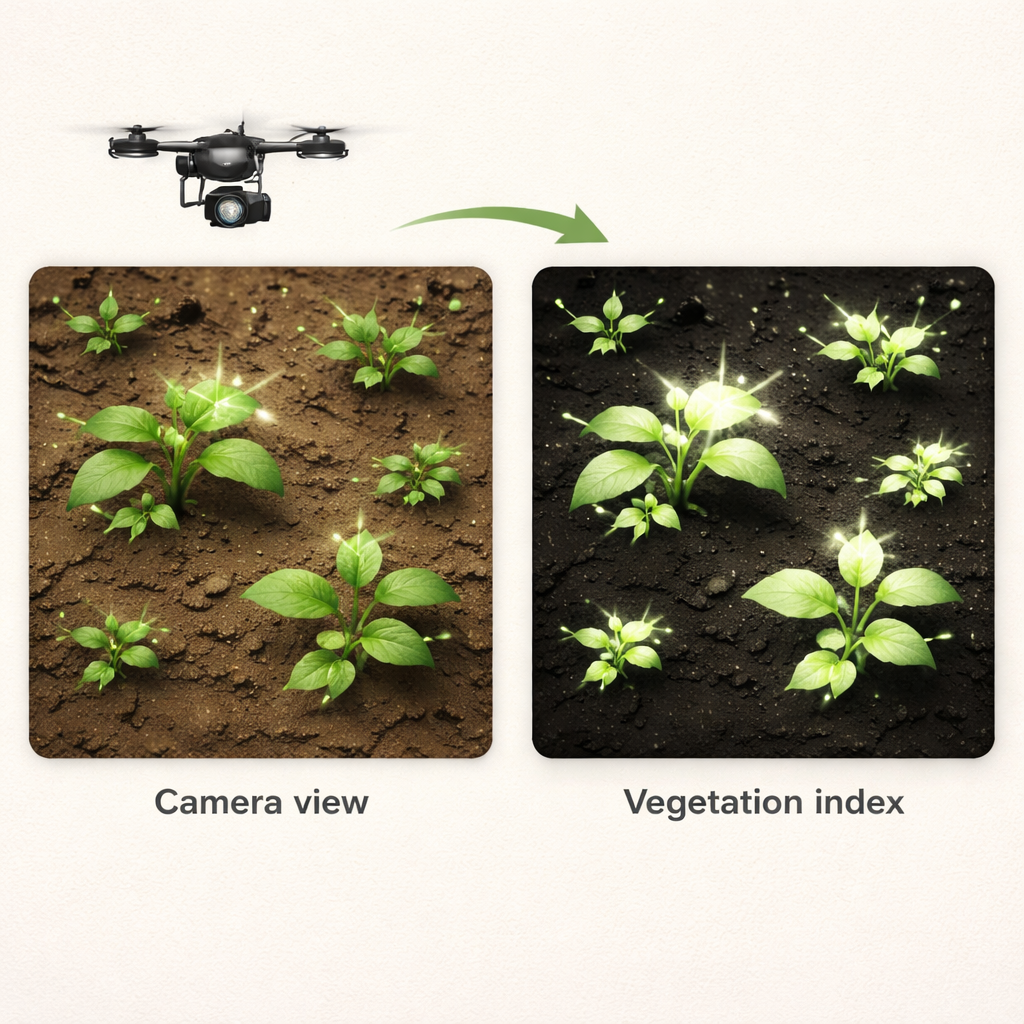
研究人员基于一个简单想法:绿色植物在普通彩色照片中与棕色土壤有明显差异。一种常用的颜色公式,称为ExG-ExR植被指数,将每个像素的红、绿、蓝值组合,使得植物像素显示为明亮而土壤像素显得较暗。该指数可由任何标准相机计算,无需额外传感器。在新系统中,这个植被指数作为第四个通道加入到常见的三色通道中,输入到流行的检测器YOLO-Pose。这个四通道视图让模型更清楚地看到植物所在区域,帮助它在寻找生长点时集中关注正确的区域。
从易到难地教会AI
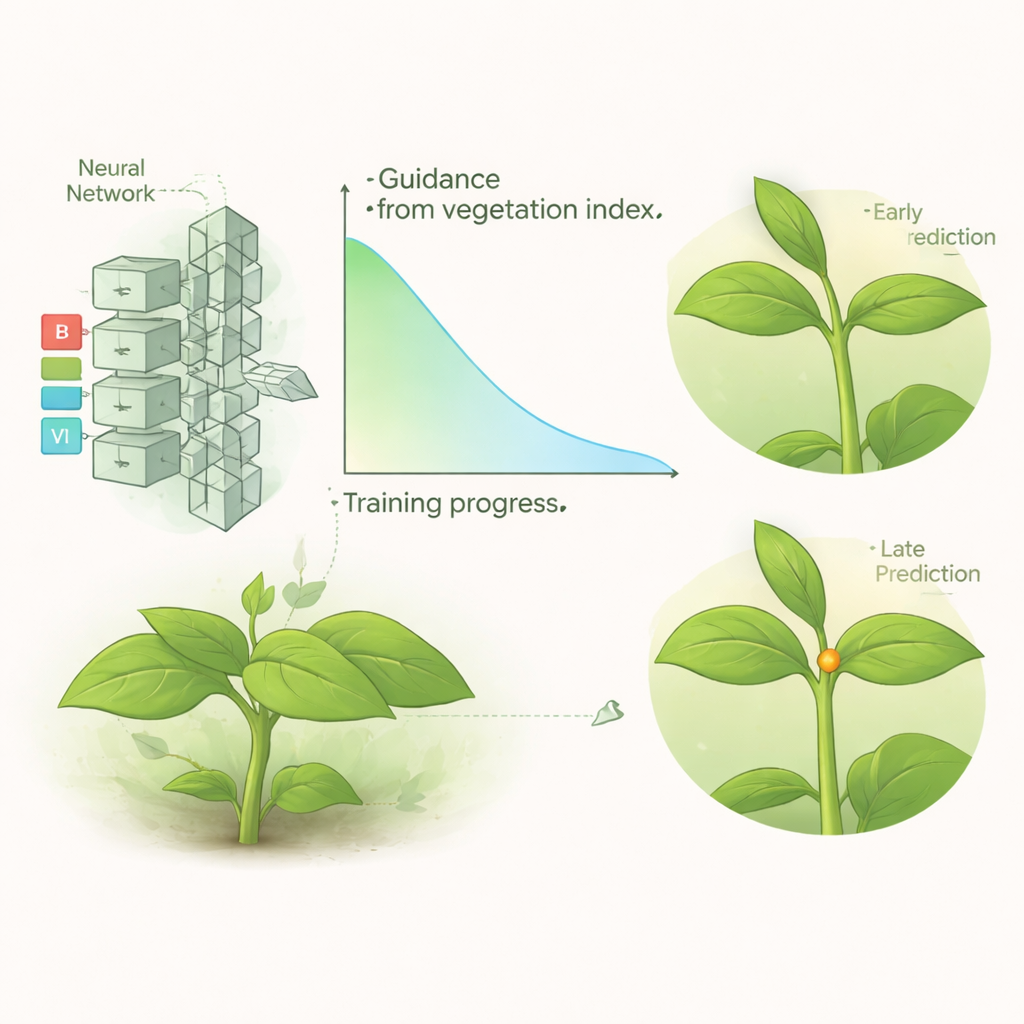
仅仅提供额外信息还不够;模型还必须学会如何利用它。团队提出了一种“历元先验退火”(EPA)策略,灵感来自人类学习方式。在训练初期,模型被强烈引导将其预测的生长点保持在植物区域内,使用植被指数作为指导。如果它将点放在土壤上,训练算法会施加较重的惩罚;如果点位于植物像素内,惩罚则较轻。随着训练推进,这种引导通过平滑的计划逐步减弱,使模型逐渐减少对粗糙颜色线索的依赖,更多地依靠它学到的细粒度视觉模式。到训练结束时,AI不再被强制偏向最绿的像素(那些像素可能并非真实的生长点),而是能够自行微调位置。
在真实田地中验证该想法
为测试他们的方法,作者在两个包含数千张田间图像的真实数据集上训练了模型,这些数据集中包含多种作物和多类杂草。他们比较了带有和不带有额外植被通道及EPA训练策略的YOLO-Pose模型版本。仅加入植被指数带来了适度提升,但将其与EPA结合则在生长点定位准确性上带来明显改进——在标准检测评分上约提高了2.4个百分点——同时不影响模型对整株植物绘制包围框的能力。额外计算开销极小(低于总成本的半个百分点),使该方法适用于资源受限的农用机器人。在不同光照条件、土壤湿度水平,甚至不同YOLO模型版本上的测试表明,该策略具有广泛适用性,尽管对先验引导的强度和持续时间有一定敏感性。
这对未来农业意味着什么
对非专业读者来说,关键结论是:在AI训练方式上做一个小小的调整——先使用基于颜色的简单线索,然后逐步让模型自主学习——就能大幅提升机器找到植物上关键部位的能力。生长点定位的这一改进可帮助未来的除草机器人将电脉冲或激光束精确地对准杂草,同时保护作物,减少除草剂使用和环境影响。同样的策略也可以适配到其他类型的植物信号和AI模型,为支持可持续、高精度农业的更智能、更可靠的视觉系统打开了大门。
引用: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
关键词: 精准农业, 杂草防治, 计算机视觉, 深度学习, 植物生长点