Clear Sky Science · zh
用于 V2I 路径损耗预测的可解释 AI 与 EDA
为何更智能的车辆到道路链路很重要
现代汽车越来越多地与周边道路通信,向交通信号灯、路侧单元和其它基础设施发送与接收无线消息。这些链路有助于安全警示、交通管理,及未来的自动驾驶。但城市街道是复杂的无线环境:高楼、树木、桥梁和卡车都可能削弱或阻挡信号。本文展示了一种既准确又能被工程师与监管者理解的方式来预测这种信号衰减。
在信任模型前先看懂数据
作者基于意大利博洛尼亚的一次大型测量活动,车辆装有天线在 24 种不同的城市场景中行驶——直路、环岛、林荫道、桥梁和交通繁忙区域——并与路侧发射器通信。从这些测量中,他们计算出“路径损耗”,即信号从路侧传播到车载设备时的衰减量。在构建任何预测模型之前,研究团队进行了细致的探索性数据分析:绘制分布、检查相关性,并将数据拆分为七个具有代表性的案例研究,例如无遮挡视距、视线被阻挡以及植被覆盖等。此步骤揭示了噪声、离群值与隐藏模式,这些都必须处理才能实现值得信赖的预测。
清理真实世界的无线混乱
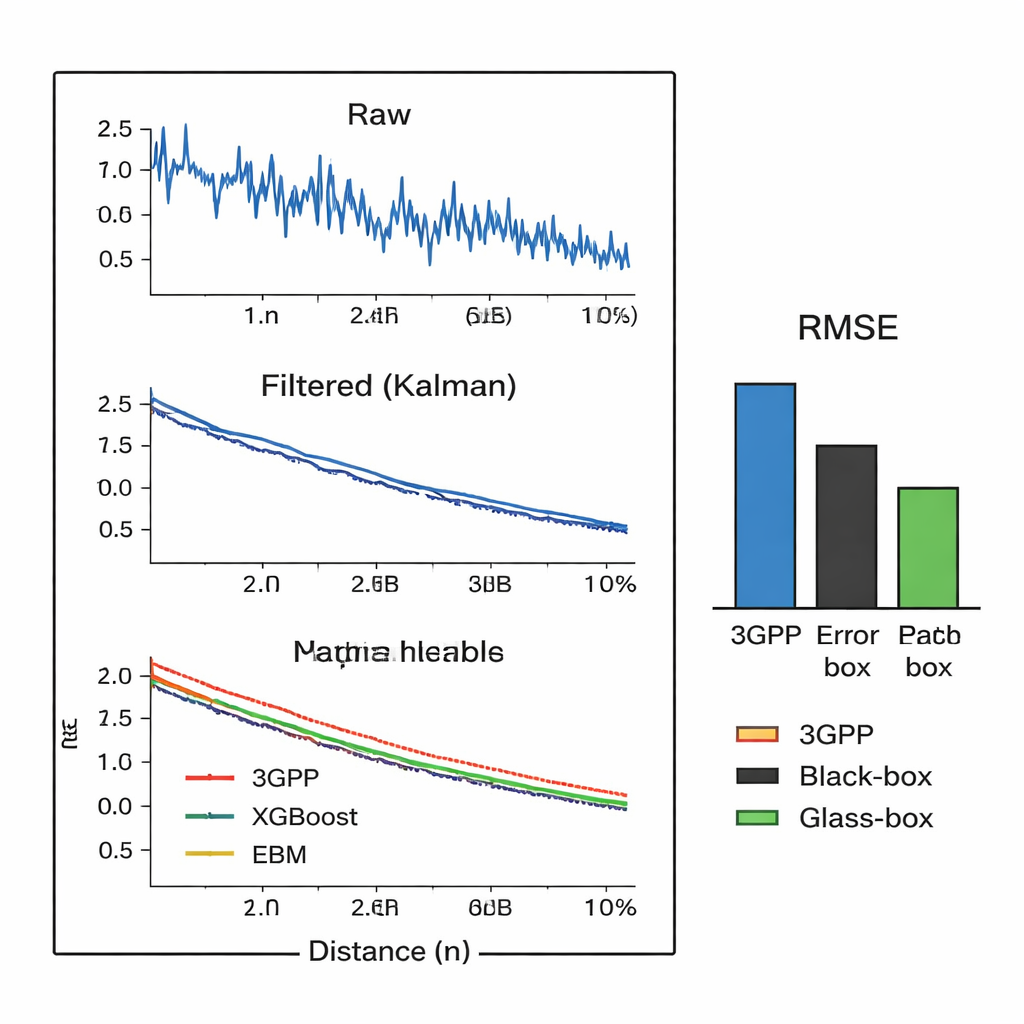
真实世界的无线数据充满不规则性,来源于测量误差、建筑反射以及路过车辆引起的瞬时遮挡。研究者设计了一条预处理流水线以驯服这种混乱。首先,他们对所有输入特征(如距离、车辆位置和速度)进行重缩放,使其具有可比性。然后利用一种鲁棒的统计规则去除离群值,剪掉极端且不一致的测量值。最后,他们应用经优化的卡尔曼滤波器——控制理论中的经典工具——在保持底层趋势的同时对随距离变化的信号进行平滑处理。通过调整滤波器参数以最大化下游模型的性能,他们表明这一清洗过程可以将预测误差降低一半以上,并揭示模型可学习的稳定模式。
打开 AI 的黑箱
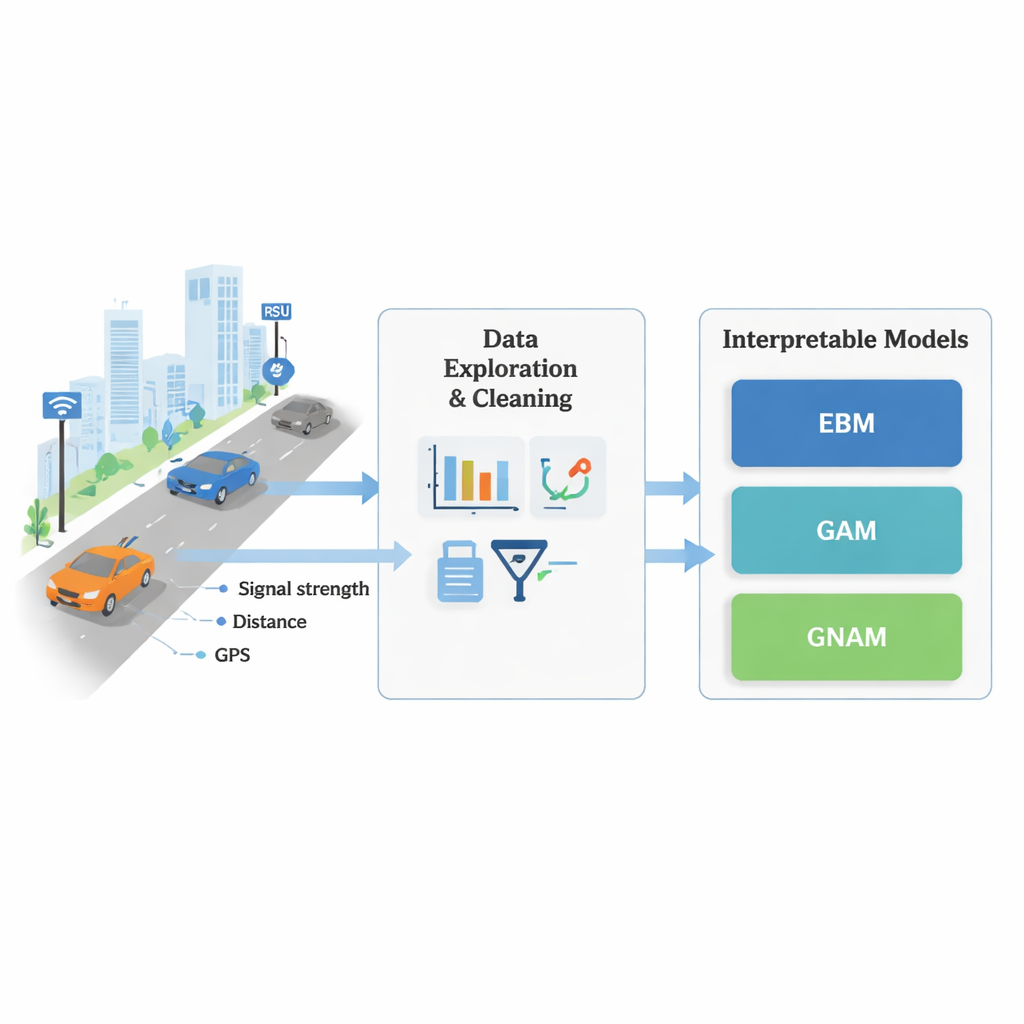
传统的无线规划公式(如 3GPP 和双斜率模型)简单且透明,但常常无法捕捉密集城市环境的复杂性。另一方面,流行的机器学习方法如随机森林和 XGBoost 虽然精度高,却像黑箱一样缺乏解释性:它们给出预测但很少说明原因。本文着重于一条中间路径:“玻璃箱”模型,它们在数学上仍然足够简单以便解释,同时能捕捉非线性行为。作者比较了三类此类模型——可解释增强机(Explainable Boosting Machines)、广义可加模型(Generalized Additive Models)和广义神经可加模型(Generalized Neural Additive Models)——以及标准黑箱算法和经典公式,并在所有场景中采用严格的训练-测试划分和 5 折交叉验证进行评估。
真实道路上驱动信号损耗的因素
通过将清洗后的数据与可解释模型结合,作者能够准确指出城市路径损耗的主要影响因素。车与路侧单元之间的距离不出所料是主导因素,但车辆的精确 GPS 坐标和时间也有贡献,反映了街道格局与交通模式如何塑造信道。在复杂场景——如建筑后的非视距区、桥下、树冠下或重型卡车密集区域——玻璃箱模型在准确性上与最佳黑箱模型相当或略有差距,但它们清晰地展示了各因素如何将预测值向上或向下推移。研究还评估了计算时间与能耗,得出这些可解释模型在路侧单元与车载设备上实时部署时速度快且资源开销小的结论。
构建更安全、更透明的车载网络
对非专业读者而言,核心信息是:我们现在能够在拥挤的城市环境中既精确又清晰地预测汽车接收道路信号的效果。与依赖无人完全理解的黑箱 AI 不同,该框架通过数据探索、噪声过滤与可解释模型,实现接近最先进水平的准确性,同时明确指出哪些因素起作用。这种透明性对安全关键的车到一切(V2X)系统至关重要,工程师、监管者甚至法庭可能需要审计相关决策。该工作为未来 5G/6G 的车到路网络指明了一条道路——不仅快速可靠,而且可问责、便于设计、测试与信任。
引用: Ameur, M.B., Chebil, J., Habaebi, M.H. et al. Explainable AI with EDA for V2I path loss prediction. Sci Rep 16, 4954 (2026). https://doi.org/10.1038/s41598-026-34987-8
关键词: 车到基础设施, 路径损耗预测, 可解释 AI, 无线信道, 5G V2X