Clear Sky Science · zh
用于轨道交通的远距离 LiDAR–相机外参标定方法
从远处守护列车安全
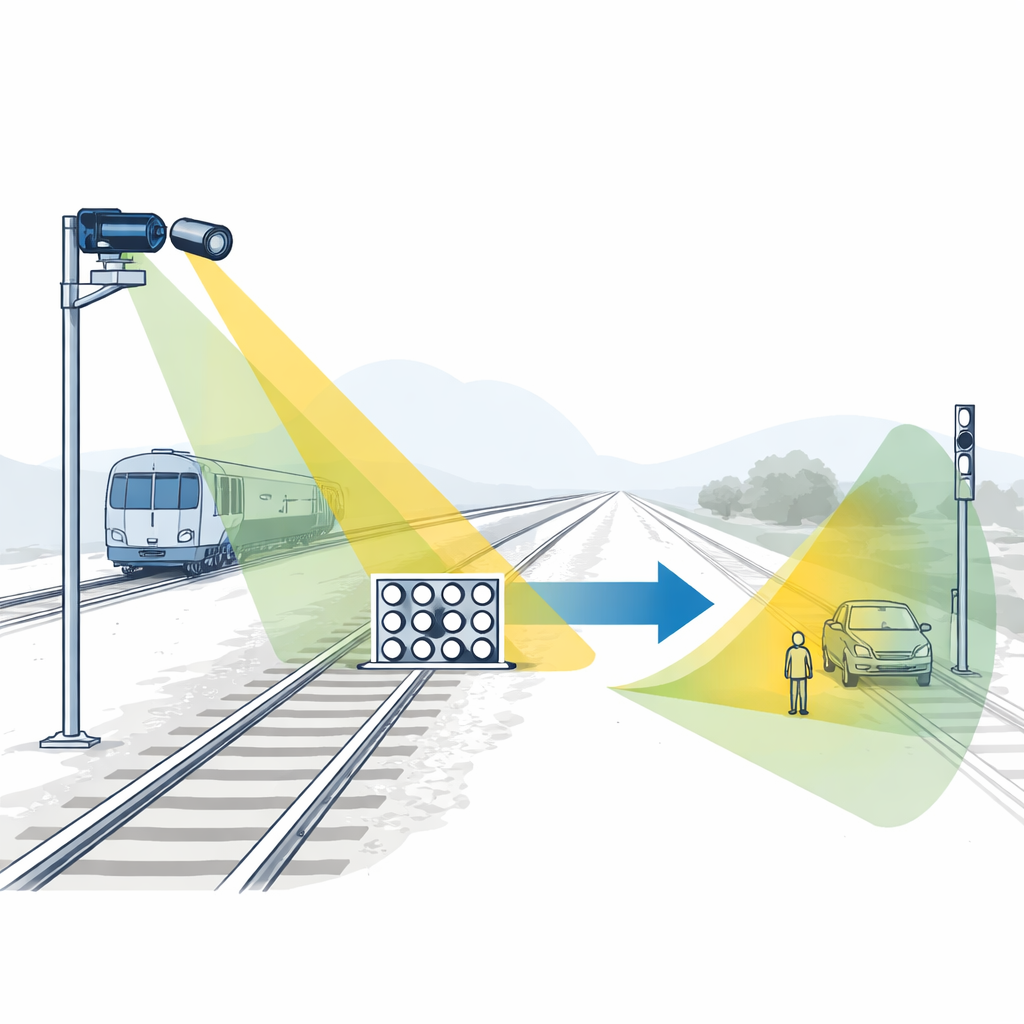
现代无人驾驶列车依赖电子“眼睛”在远早于人类可见的距离检测轨道上的障碍物。其中最重要的两种感知设备是相机和称为 LiDAR 的激光扫描仪,它们以不同方式感知世界。要让它们协同工作,必须将二者精确对齐;当监视几百米外的轨道时,这项工作会变得出乎意料地困难。本研究提出了一种新的传感器对齐方法,使它们在远距离上也能可靠地保护铁路系统。
为何传感器对齐很重要
在自动列车上,相机捕捉细节丰富的彩色图像,而 LiDAR 通过发射光脉冲并计时返回来测量距离。将这两种视角融合可以让系统发现并跟踪可能侵入轨道区域的目标,从道口的抛锚车辆到轨道上的碎片。但融合仅在系统精确知道相机与 LiDAR 之间的相对位置时才有效。微小的错位在远距离处会将检测到的障碍物偏移几十厘米甚至几米,这可能导致自动保护系统响应变慢或可靠性下降。
远处观测的挑战
在轨道应用中,工程师常用长焦镜头以便相机能清晰看到数百米外的目标。然而在这些距离上,用于标定的目标在 LiDAR 中的回波会非常稀疏:只有极少激光点落在用于对齐的标板上。大多数现有对齐技术假设存在密集的 LiDAR 点云或场景中丰富的边缘信息,而这些条件在远距情况下通常并不成立。因此,很难在二维图像与三维点云之间找到足够精确的匹配特征,从而支持安全的列车控制。
更聪明的标定板
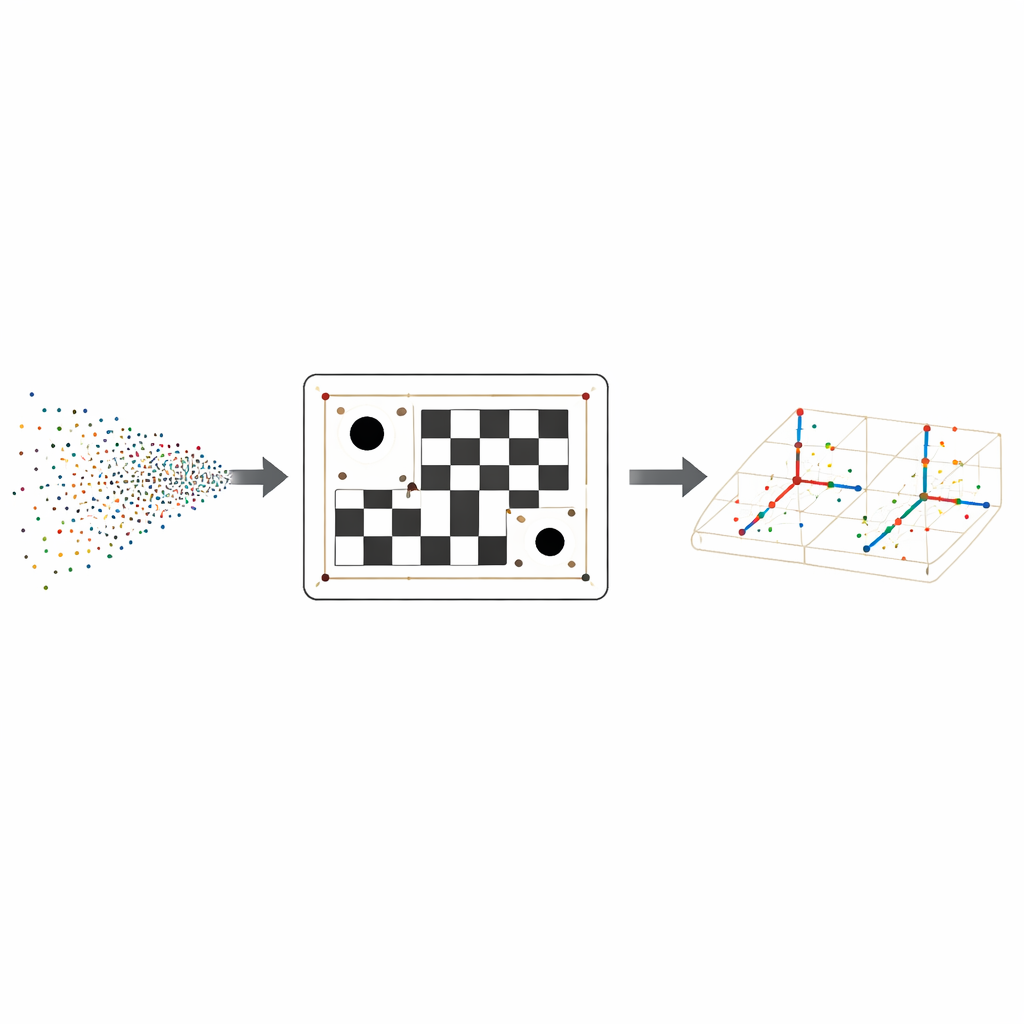
为了解决这一问题,作者设计了一种特殊的标定板,将常见的黑白棋盘格与三个圆孔结合在一起,圆孔的圆心构成一个不对称的三角形。棋盘格为相机图像提供了大量精确的角点,而圆孔则为 LiDAR 提供了强烈的几何线索,LiDAR 即使在远处也能较容易地检测到圆边。由于三个圆孔被放置成非对称三角形,可以明确确定标板在空间中的朝向,避免了镜像或旋转视角所造成的歧义。
将稀疏点转为可靠匹配
在 LiDAR 端,该方法首先清理点云并拟合出代表标板的平面。然后将点投影到该平面上,并使用鲁棒的圆拟合程序找到每个圆孔的圆心,通过强制已知的圆孔间物理距离来精细调整它们的位置。确定圆心三角形后,算法在标板上建立局部坐标网格,预测每个棋盘角点在三维中的位置,并在其附近检查具有适当亮度(即反射率)值的 LiDAR 点。几何信息与反射率的结合将为数个零散的回波转化为一组可靠的三维角点位置,从而与相机的二维角点建立匹配。
微调传感器间关系
一旦在相机图像与 LiDAR 点云中识别出相同的物理角点,作者便求解连接两传感器的精确旋转和平移。他们使用一种迭代优化技术,反复调整该关系以缩小 LiDAR 点投影到图像上的位置与相机实际看到的角点之间的差距。在真实轨道平台上的测试、使用从中等到强力长焦的不同镜头,表明该新方法在投影误差方面始终保持约一像素或更小,并且在最长焦距、数据最稀疏时尤其优于若干知名替代方法。
这对轨道安全意味着什么
通俗来说,这项研究提供了一种更可靠的方式,告诉自动列车上的相机与 LiDAR:“你在这里,并且正朝这个确切方向看。”通过重新设计标定板并对稀疏 LiDAR 数据进行智能处理,该方法即使在传感器监视数百米外场景时也能保持高精度。这种更紧密的对齐使融合系统能够更精确地在三维空间中定位障碍物,加强了更安全轨道交通的技术基础,并提升了现实世界中多传感器感知的可信度。
引用: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
关键词: 轨道交通安全, LiDAR 与相机融合, 传感器标定, 自动列车, 远距感知