Clear Sky Science · zh
使用直接系统校准与微弱激光线提取进行浅海结构的3D重建
将隐藏的水下世界呈现出来
我们许多最引人入胜的过去遗迹如今沉没在水下——沉船、被淹没的城市与沿海遗址。为了对这些地点进行数字化探索与保护,研究人员需要精确的海底三维地图。然而在浅水区,强烈日照、漂浮的沙粒以及水体本身会让精确测量变得异常困难。本文提出了一种在有阳光和噪声干扰的条件下,仍能使用低功率蓝光激光扫描并重建水下结构详细三维模型的新方法——在这些环境中,现有方法往往失效。
为什么扫描浅海如此困难
创建场景的数字三维模型通常意味着组装空间中数百万个点——科学家称之为点云。在陆地上,激光与相机可以可靠地完成这项工作。但在水下,情况变得混乱。水会折射和散射光线,使场景被蓝绿色的雾霾包裹并模糊边缘。穿过波面的阳光产生的亮动图案(称为焦散)会盖过低功率激光的细线。微小颗粒又增加一层薄雾和闪烁反射。因此,许多现有水下系统只能在夜间、极低光照或严格受控的条件下工作,而真实海洋并非如此。
作为三维画笔的旋转蓝色激光
作者们构建了一个紧凑的防水扫描仪,像一支三维画笔。它投射一片薄的垂直蓝色激光光片,随着装置臂缓慢旋转而扫过。当这片光片照到岩石、墙面或文物时,会描出一条发光曲线。安装在激光旁的相机在每个小的旋转步进处拍摄图像。通过结合所有这些视图,系统可以重建出附近环境的密集三维点云,并保留近似颜色,随后可将其转换为用于可视化或虚拟现实的表面网格。
教系统识别每个像素在空间中的位置
此类系统的核心挑战是校准:弄清每个相机像素如何对应真实世界坐标。传统方法依赖相机和水体的详细数学模型,包含数十个需调节的参数,使方法脆弱且易出错。在这里,研究者采取了以数据为中心的路线。他们通过扫描覆盖已知网格的墙面,直接学习从图像像素到三维位置的映射。仅需几百个精心选择的样本点。将其存入查找表后,该映射让扫描仪能够将任何被检测到的激光像素转换为三维点,而无需显式求解复杂的相机方程。
拉直并增强微弱的蓝色痕迹
由于校准在空气中进行,水下影像必须先被“拉直”,以撤销水面对光线的折射造成的变形。团队使用跨越空气与水面的网格图像来测量这种扭曲,然后计算每个水下像素若在空气中看到会如何位移。完成去畸变后,真正的难点开始:在噪声图像中找到一条微弱且常常断裂的蓝线。该方法首先为每个像素计算一个“蓝度”值,使接近激光蓝色调的光突出显示。接着考察每个像素相对于邻域的蓝度提升,并使用机器学习分类器形成一个可能为激光像素的大致黑白图。
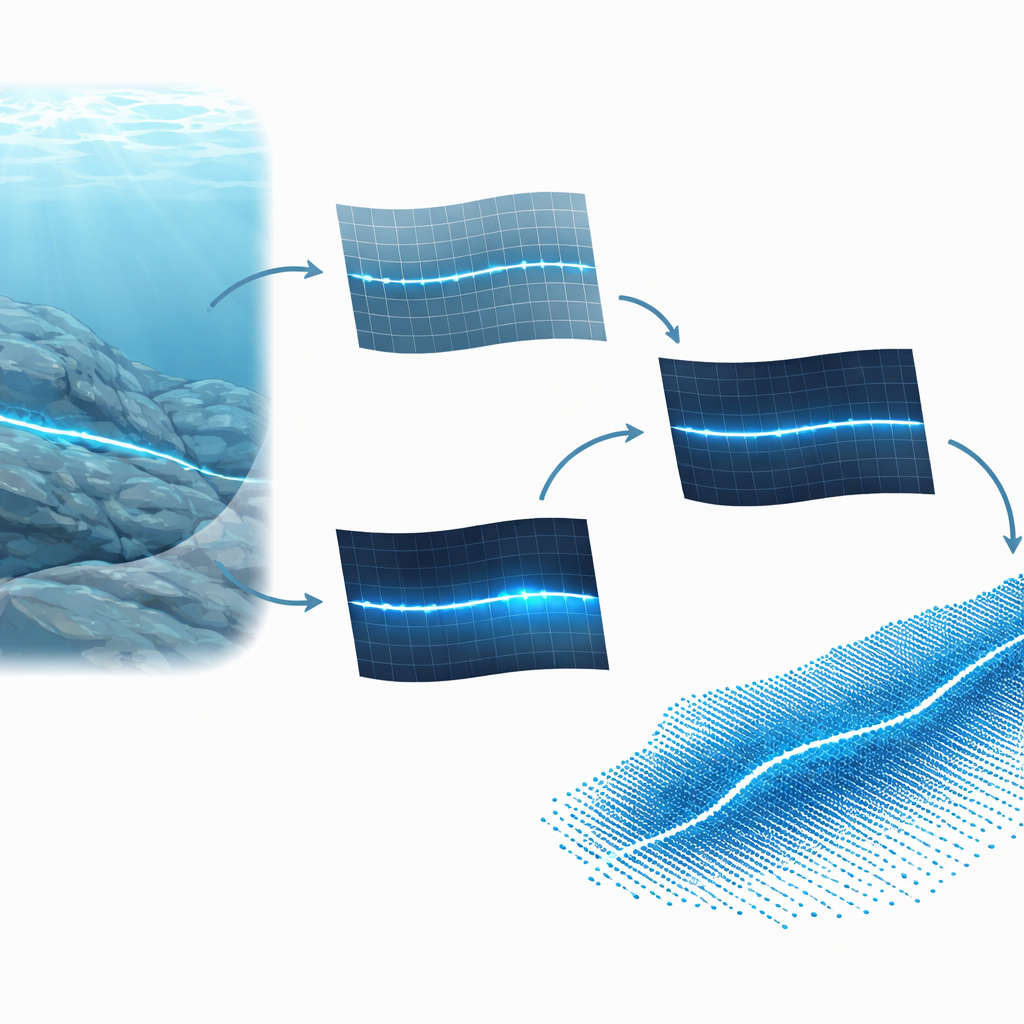
从噪点到干净的三维形状
该初步图仍包含许多来自沙粒、反射和焦散的误报。为清理这些误报,系统使用经典技术搜索直线模式,通过基于像素位置的投票来找出可能的直线。它只保留与激光预期方向相匹配的那些直线。然后在剩余点上拟合出一条平滑曲线,如果某像素靠近该曲线且蓝度较强,其“置信度”就会提高。对于图像中的每一行,置信度最高的像素被选为最终激光轨迹的一部分。将这些清理后的轨迹逐步输入校准表,即可生成带有原始相机颜色的三维点云。
在真实水域中效果如何?
作者在水槽和约五米深的浅海中测试了他们的系统,光照条件从昏暗的室内光到正午强光(数万勒克斯)。他们扫描了尺寸精确已知的物体——一个球体和一个定制的有机玻璃形状,并将测量尺寸与真值比较。在约半米以内的距离上,即使在强光下,典型误差仍低于毫米的若干分数;在更远距离上,误差在几十分之毫米范围内,直到激光线对肉眼几乎不可见。专为黑暗条件设计的现有方法在这些高光照条件下根本无法重建场景。
这对水下遗址勘探意味着什么
本质上,这项工作表明,对浅海水下结构进行精确三维测绘并不需要笨重的大功率激光或完全受控的黑暗环境。通过细致地校正水对光的折射、强调激光色彩以及使用将像素直接绑定到真实世界位置的直接校准,系统能够在有噪声的阳光场景中可靠地从微弱的蓝色痕迹中提取信息。尽管在极端明亮的条件或某些物体颜色下性能会下降,但该方法为更常规、低成本地扫描珊瑚礁、港墙与淹没遗址打开了可能,帮助科学家和保护人员构建忠实的水下世界数字副本。
引用: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
关键词: 水下3D扫描, 激光线重建, 浅海测绘, 点云成像, 水下考古