Clear Sky Science · zh
来自多雷达和射频接收器的时间同步多传感器无人机数据集
为何监测天空至关重要
无人机已迅速从玩具和影视工具演变为用于配送、巡检、农业等重要设备。但同样的小型飞行器也可能被滥用于侦察、走私甚至攻击。阻止危险无人机很难,因为它们体积小、速度快,且常在复杂的真实场景中飞行。本文介绍了一个新的开放数据集,帮助科研人员和工程师构建更聪明的系统,通过无人机的不可见无线指纹来发现、跟踪和识别它们,而不仅仅依靠外观或声音。
用不可见的电波“聆听”无人机
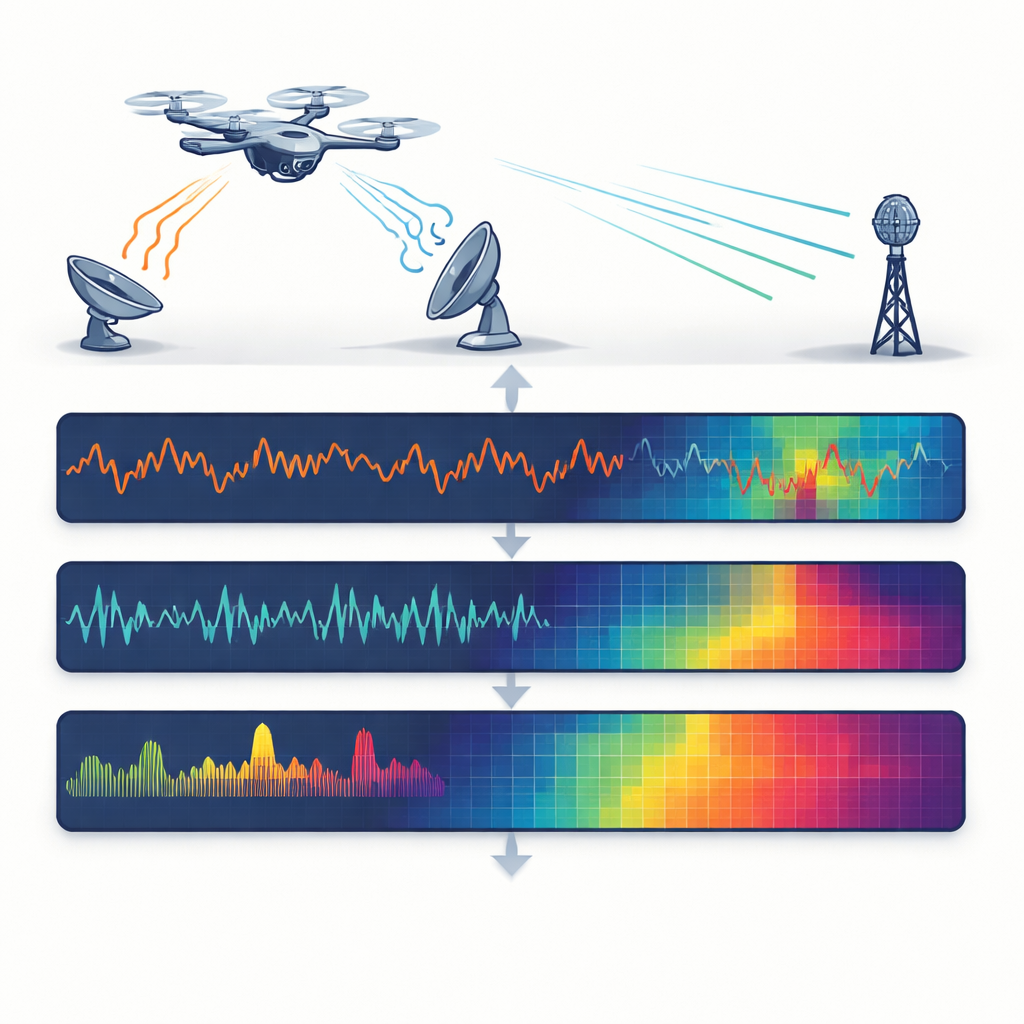
研究者没有依赖摄像头或麦克风,而是关注射频电波,这些信号在昼夜、雾雨或强光下均能工作。他们同时使用三种基于无线的传感器:一种发出稳态音调以感知运动的雷达,一种通过扫频来测量距离和速度的雷达,以及一种仅被动监听无人机控制和视频信号的无线接收器。每个传感器以不同方式“看见”无人机——通过旋翼微小振动、与传感器间的距离变化或其无线链路的结构——就像把视觉、听觉与触觉结合成更完整的感知。

搭建精心控制的测试场
为了生成可信的数据,团队在一片没有高大建筑的空旷场地中飞行了四款常见商用无人机,并放置了一个简单的金属角反射器作为非无人机参照。所有目标都在相同高度悬停,面向安装在三脚架上的传感器簇,因此每个设备几乎从相同角度观测场景。无人机在2到30米的范围内以2米步长布置,每种无人机类型、距离和传感器组合都有500次重复记录。这种精心设计使得研究者能够研究检测随距离变化的表现,并比较尺寸、重量和结构不同的机型之间的差异。
让不同传感器同步“呼吸”
该数据集的一大优势在于三种传感器在软件上实现时间同步。所有设备由单一控制程序驱动,统一触发并按锁步保存其输出。每个传感器的记录都与其他传感器有配对文件,通过共享索引对齐,而不是依赖复杂的硬件时钟。对于两台雷达,系统捕获原始信号或显示反射能量如何在距离和速度上分布的处理后图谱;对于无线接收器,则保存原始通信信号。这种共享时序让研究者可以直接跨传感器融合信息——例如将旋翼运动的闪烁与控制链路的突发相互对应——而无需在事后费力对齐数据。
从原始波形到机器可用的图像
鉴于现代检测工具常依赖深度学习,作者还将原始测量转换为计算机易于处理的类图像视图。对于稳态音调雷达,他们提取由旋转桨产生的频谱模式(称为微动)并将其表示为简单的频谱图。对于扫频雷达,则生成彩色的距离—速度图像,突出无人机的运动位置和方式,并去除背景杂波。对于无线接收器,他们计算功率如何在频率上分布,创建各无人机通信风格的指纹。每个原始文件都有对应的图像文件,科研人员可以选择在信号级别工作,或直接使用标准的基于图像的神经网络。
证明更多“眼睛”优于单一视角
为证明该数据集不仅有趣而且有用,团队分别在每种传感器的图像上训练了广为人知的图像识别网络,并在融合三者的输入上进行训练。如预期,随着无人机距离增加,雷达的表现明显下降:反射信号减弱,分类准确率随距离下降。无线接收器在距离方面表现更稳健,但部分无人机使用几乎相同的通信频段,单凭该传感器难以区分。当研究者将三种视图合并为单一复合输入时,整体性能都有所提升,尤其对更小、更难检测的无人机提升明显。这证明了时间同步的多传感器信息可以弥补单一设备的盲点。
对更安全领空的意义
简单来说,作者构建了一个详尽的、公开的“训练场”,让智能算法能够同时利用多种无线“之眼”来识别无人机。通过公开原始信号与可直接使用的图像以及示例代码,他们降低了他人设计在多变条件和不同距离下可靠工作的检测系统的门槛。随着时间推移,基于该数据集构建的工具可帮助机场、关键设施和城市管理部门更好地区分友好无人机与可疑目标,从而在不单靠摄像头或人工观察员的情况下,提高低空空域的安全性。
引用: Han, SK., Jung, YH. A Time-Synchronized Multi-Sensor drone dataset acquired from multiple radars and RF receiver. Sci Data 13, 407 (2026). https://doi.org/10.1038/s41597-026-06802-6
关键词: 无人机检测, 雷达感知, 射频信号, 传感器融合, 开放数据集