Clear Sky Science · zh
用于固定翼无人机系统的机器学习和智能轨迹优化的开放基准数据集
更智能的无人机飞行为何重要
从作物调查到搜救,固定翼无人机在我们头顶上悄然承担着越来越多的任务。让这些飞行器更可靠并减少对人类飞行员的依赖,可能会带来更安全的投递、更精确的环境监测以及在紧急或冲突区域更具韧性的行动能力。但进展日益受限的并非缺乏聪明的想法,而是缺少真实世界的数据。本文介绍了一个新的开放数据集,包含数百次自主无人机飞行,旨在为工程师和学生提供一个共同且丰富的基础,从而在相同的数据上开发和测试更智能的飞行算法。
面向真实任务的飞行实验室
作者使用一种结实的滑翔动力式飞机——Volantex Ranger 2400,构建了他们的数据集。该机翼展约二点五米、机翼外形高效且机舱宽敞,能够携带现代电子设备并维持长时间、稳定的飞行。它由后置电动机驱动,配备为续航而非短时高功率调校的定制锂离子电池组。团队以完全自主模式飞行该平台,使用预先规划的航线覆盖关键飞行阶段:起飞、直线巡航、急转弯、动态机动和自动着陆。这种受控但逼真的设置将Ranger变成一个飞行实验室,其行为类似于民用和防务场景中使用的小型作业无人机。
同机体,双“大脑”
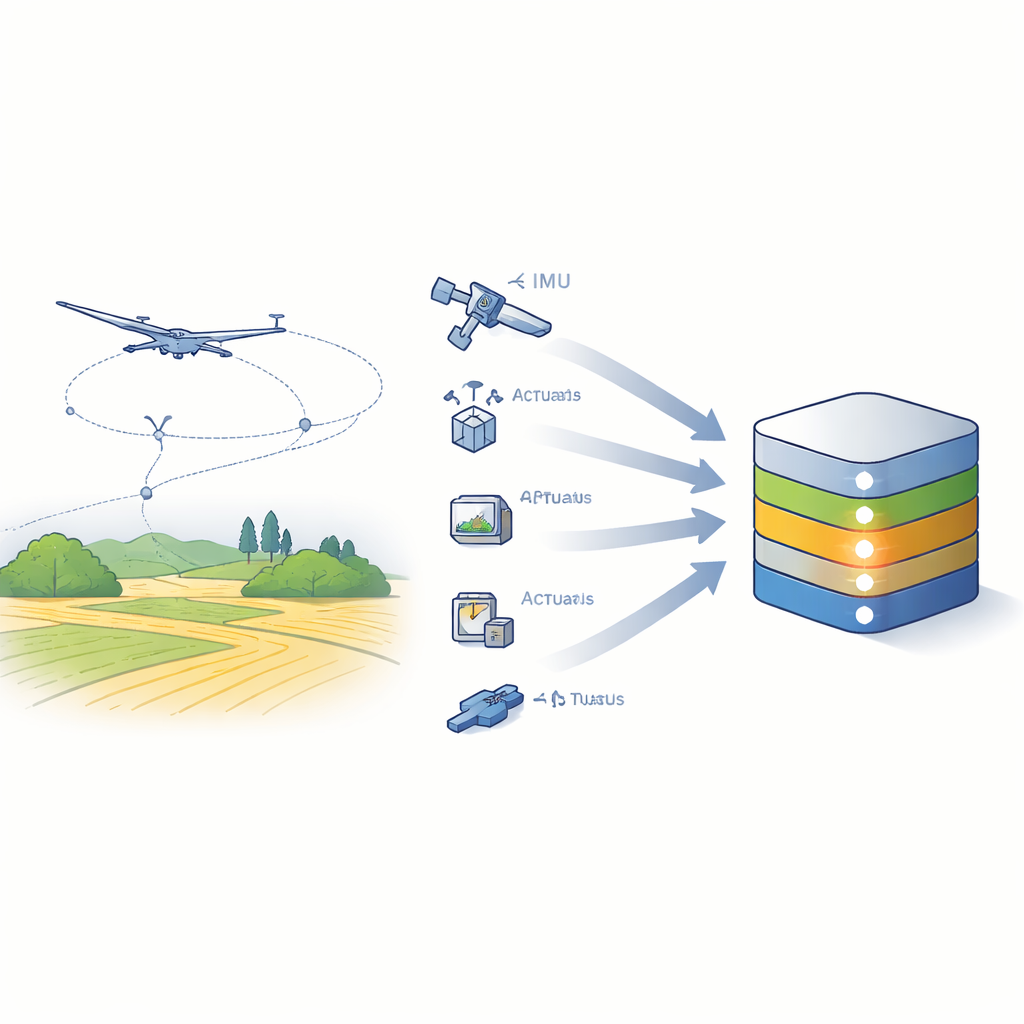
为了覆盖广泛的使用场景,研究者在同一机体上装配了两种截然不同的“中枢”。一种配置使用体积小、价格低的SpeedyBee F405飞控,类似电子爱好者在自制无人机上可能使用的设备。另一种则将专业级Pixhawk 6X自动驾驶仪与强大的Jetson Orin NX计算机结合,能够在机载运行复杂的人工智能软件。两套系统都记录详细的遥测数据,包括惯性传感器的运动、GPS位置与速度、海拔、空速、舵面指令、电池状态和飞行模式,采样率足够高以精细重建飞机的运动。通过在保持机体不变的情况下更换电子设备,数据集使研究者能够研究不同机载计算与感知水平如何影响飞行行为。
数据集包含的内容
得到的IDF‑DS集合包含240次自主飞行,大约32小时的空中时间以及数千万条记录样本。每次飞行都以一致的文件夹结构存储,方便用户快速找到主日志、任务计划、控制器设置和可直接查看的GPS轨迹。一类任务沿矩形田地做之字形航线,适合可重复比较或训练预测模型。另一类则仿照著名MotoGP赛道的赛道环形,包含急弯、宽弧和直线段,对自动驾驶仪构成挑战。对于每种配置和任务,日志捕捉的是飞机实际的飞行状况,而不仅仅是理论上的计划轨迹。
把原始飞行数据转化为洞见
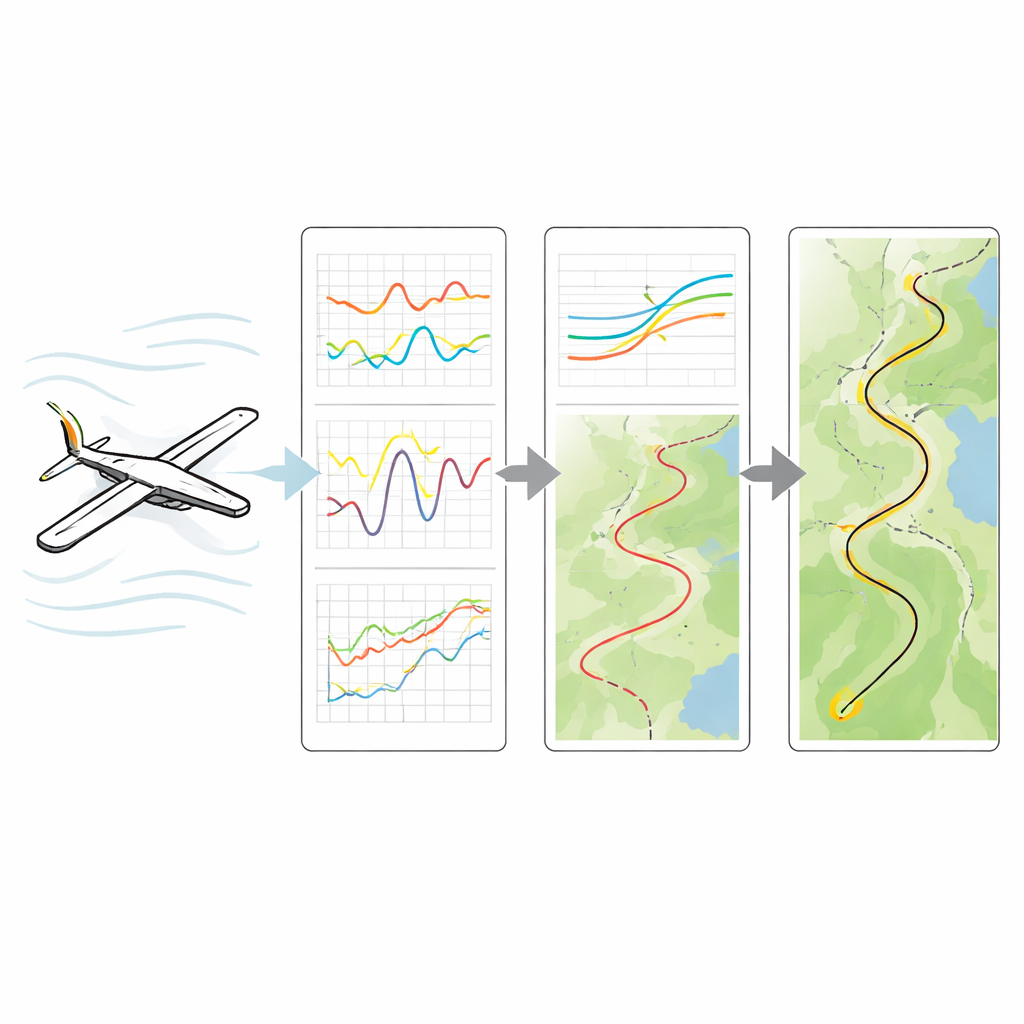
为展示该宝贵资源的用途,作者演示了若干示例分析。他们通过将机载运动传感器读数与从GPS轨迹推断的加速度和旋转进行比较,检验传感器的质量,确认这些测量足够可靠,可作为训练模型的“地面真值”。他们研究自动驾驶仪在三个方向上对速度的估计精度、飞机跟踪计划路径的贴合程度,以及在爬升、转弯和稳定巡航时的电力消耗。通过结合空速、地速与姿态,他们甚至重建了飞机沿航线所遇到的风场,从机载读数中描绘出阵风和侧风的情况。另一个用例概述了如何利用相同数据流训练人工智能模型,以便在卫星导航不可用时估计位置。
这项资源如何助力未来飞行
通俗地说,这项工作是为社区提供一个来自数百次飞行、任何人都可以打开的共享“黑匣子”。与每个团队必须自行收集昂贵的测试数据并将其私有化不同,研究者和学生可以下载这一开放数据集,立即开始探索在GPS失效时保持航向、在故障变危险前发现隐患,或通过选择更高效路径来延长电池寿命的新方法。论文本身并未直接构建这些智能系统;它构建了它们所需的基础。对读者而言,要点是:空中自主性的进步如今与其说依赖聪明的算法,不如说同样依赖开放且有详尽说明的飞行记录——而该数据集朝这个未来迈出了重要一步。
引用: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
关键词: 固定翼无人机, 飞行遥测, 自主导航, 机器学习数据集, 轨迹优化