Clear Sky Science · zh
SPICE-HL3:用于探索高纬度月球地貌的单光子、惯性与立体相机数据集
为何月球阴影对机器人至关重要
未来前往月球极地的任务希望开发冰水等资源,但这些区域也是太阳系中视觉上最令人困惑的地方之一。长长的移动阴影、刺眼的眩光和近乎全黑的环境很容易欺骗机器人的相机。本文介绍了SPICE‑HL3,一套在室内“月球小样”中创建的全开放数据集,使全球科学家能够在这些严酷的极地条件下测试机器人视觉与导航能力,其中包括一台能够在黑暗中“看见”的尖端单光子相机。
在地球上重建月球极地的一片地表
由于来自月球极地的真实数据稀缺且获取成本高,团队在卢森堡大学建造了一个名为LunaLab的受控测试平台。它是一个11×8米的室内地形,填充粗糙的玄武岩砾石、岩石和陨坑,四周为黑色的墙壁和天花板,以模拟月球吸光且无大气的环境。一个强力可移动聚光灯模拟近地平线处的太阳,产生长而清晰的阴影,以及阳光照射坡面与漆黑陨坑内部之间的巨大亮度差异。通过改变灯的位置和亮度,研究者复现了四种不同的照明情景——参考态、正午、黎明/黄昏和夜间——类似于近极地区漫长月昼中漫游车会遇到的光照变化。 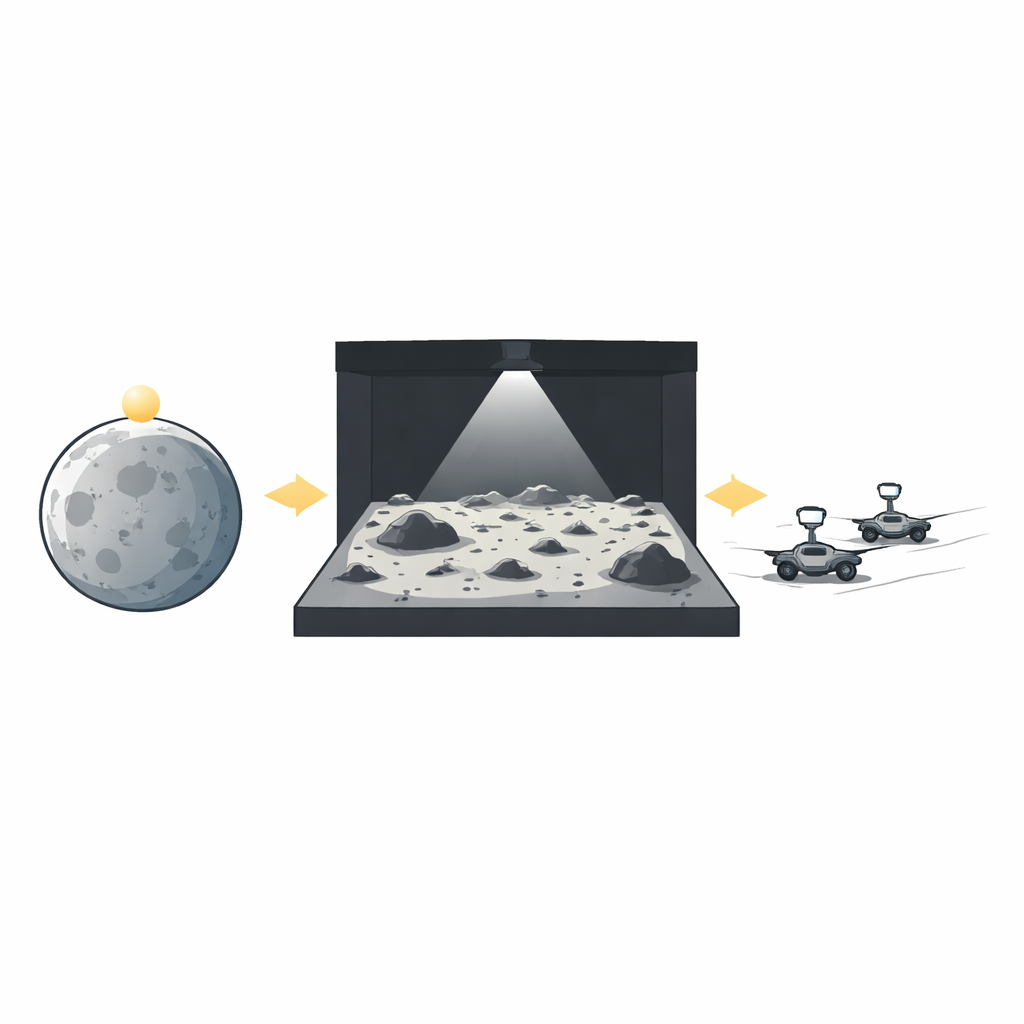
漫游者、传感器与能数单光子的相机
数据集由两台小型轮式漫游车采集,搭载了不同组合的相机和运动传感器。一台漫游车配备了常规单色相机与新型单光子雪崩二极管(SPAD)相机;另一台则搭载了带内置运动传感器的立体彩色加深度相机。两台漫游车均记录车轮转动和惯性数据,同时一套上方的动作捕捉系统以亚毫米级精度跟踪它们的真实位置。SPAD相机是突出技术:像素不是测量连续的光强值,而是报告是否检测到单个光子,具有极高的速度和灵敏度。通过组合大量这种超快的二值快照,系统能够重建图像,即便在非常昏暗或极高对比的场景中也能保留细节,而常规相机往往会模糊或饱和。
以多种方式捕捉类月球的行驶场景
为了为研究人员提供丰富的测试场景,作者设计了七种类型的漫游路径,从模仿谨慎行星驾驶的长距离停走式穿越,到相对于人造太阳不同方向的短距离连续行驶(朝向、背向和横向),以及原地紧转弯。他们在慢速行走速度及十倍速度下重复这些路径,覆盖多种照明条件,有时打开漫游车前灯,有时关闭。总体而言,SPICE‑HL3包含88个时间同步序列、近130万张图像,以及匹配的运动和真实位置数据。这些图像既有适合精细分析的静态场景,也有考验运动模糊和曝光控制的快速序列。所有内容都被组织在清晰的文件结构中,并附带标定文件,详细描述每台相机和传感器的朝向以及它们时钟的时间对齐方式。
将单光子视觉付诸考验
除了发布数据之外,团队还检验了记录图像的质量和实用性。他们比较了SPAD、单色相机和立体相机在一些最严峻视觉情形下的表现:黄昏与夜间行驶,以及漫游车直面“太阳”的行驶。通过简单的图像质量度量与目视检查,他们发现单光子相机在明亮与阴影区域中持续保留结构、维持宽广的亮度范围,并在各种条件下保持稳定。常规相机在场景光照充足时表现良好,但要么在极暗区域丢失细节,要么在光源附近高光溢出。作者还验证了常见的建图与定位软件能够成功处理该数据集,确认时间戳、标定与格式足够稳健,适用于真实的机器人学研究。 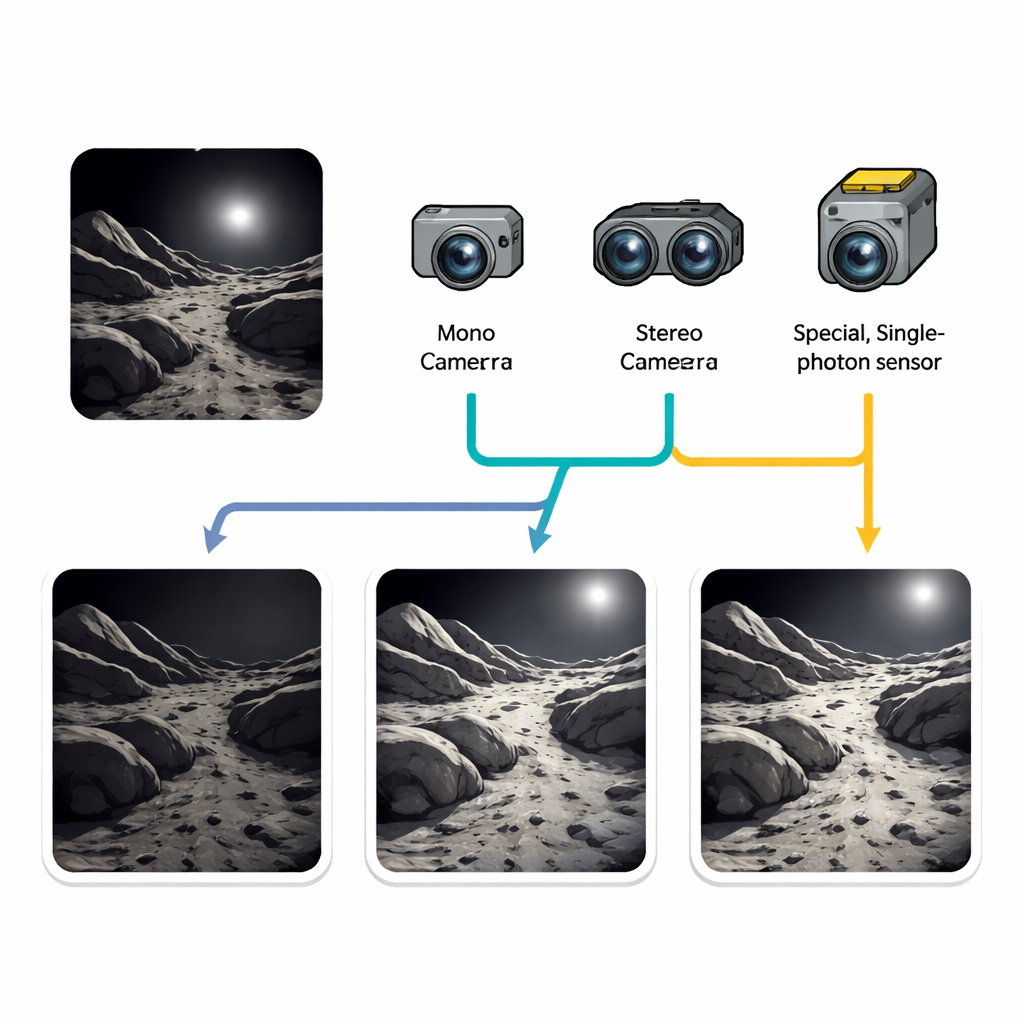
局限、注意事项与其重要性
尽管LunaLab无法完全重现真实月壤的微小尘粒与细微散射效应,并且动作捕捉系统产生的一些意外红外微光渗入了最暗的场景,作者认为SPICE‑HL3仍然代表了对漫游车视觉的苛刻“最坏情况”光学环境。对于准备前往月球极地的工程师和科学家——或为任何昏暗、高对比环境设计机器人的研究者——该数据集提供了罕见且公开的基准。它使得像SPAD传感器这样的新型相机技术可以与传统系统进行公平比较,改进导航与建图算法,并最终有助于确保未来漫游车能在月球不断变化的阴影中安全前行,而不是被困于黑暗中。
引用: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
关键词: 月球机器人, 行星导航, 单光子成像, 机器人视觉数据集, 极端照明