Clear Sky Science · zh
大规模相干 4D 成像传感器
以四维观察世界
自动驾驶汽车、投递无人机和增强现实头戴设备都依赖能够实时理解周围三维世界的机器。如今,这类视觉系统往往体积大、价格高或耗电多。本文报道了朝着“4D 相机”迈出的重要一步——一种芯片级传感器,不仅能绘制场景的三维形状,还能测量物体的运动,有望把紧凑的机器视觉带到从机器人到智能手机的各种设备上。
从平面照片到动态地图
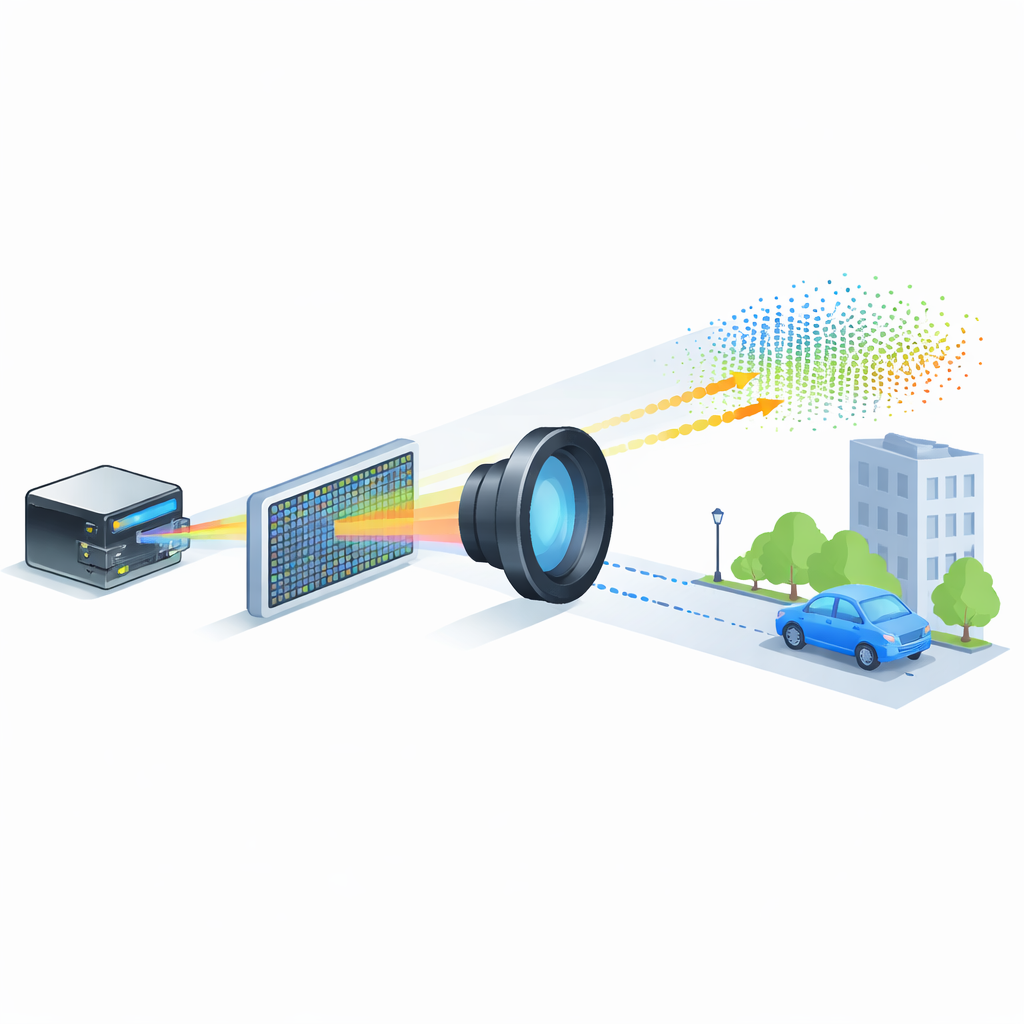
传统相机在平面上记录光强,能产生精美的二维图像,却无法直接提供距离信息。相比之下,光学探测与测距(LiDAR)系统发射激光脉冲并测量其返回时间,以构建周围环境的三维地图。现有方法可以实现远距离和高细节成像,但通常需要机械移动部件、大尺寸光学元件或对每个测点消耗较高能量。这使得很难制造出既像智能手机相机一样小巧、廉价而又足够稳健,能够安全细致扫描街道、工业场所或拥挤室内环境的设备。
一种能测量距离与运动的芯片
研究人员提出了一种新型 LiDAR 焦平面阵列——本质上是成像芯片版的 LiDAR。该器件包含 352 × 176 像素,总计超过 6 万个感测点,所有元件在单个硅光子芯片上集成,并配有控制电子电路。系统不使用短脉冲激光,而是依赖频率调制连续波(FMCW)光,其中激光的频率以受控的“啁啾”方式扫动。当光线从物体反射并返回芯片时,会与参考光束进行相干合成。微小的频率差异同时揭示每个点的距离和相对于传感器的径向速度,从而把速度作为第四个测量维度纳入。
微小光网格的工作原理
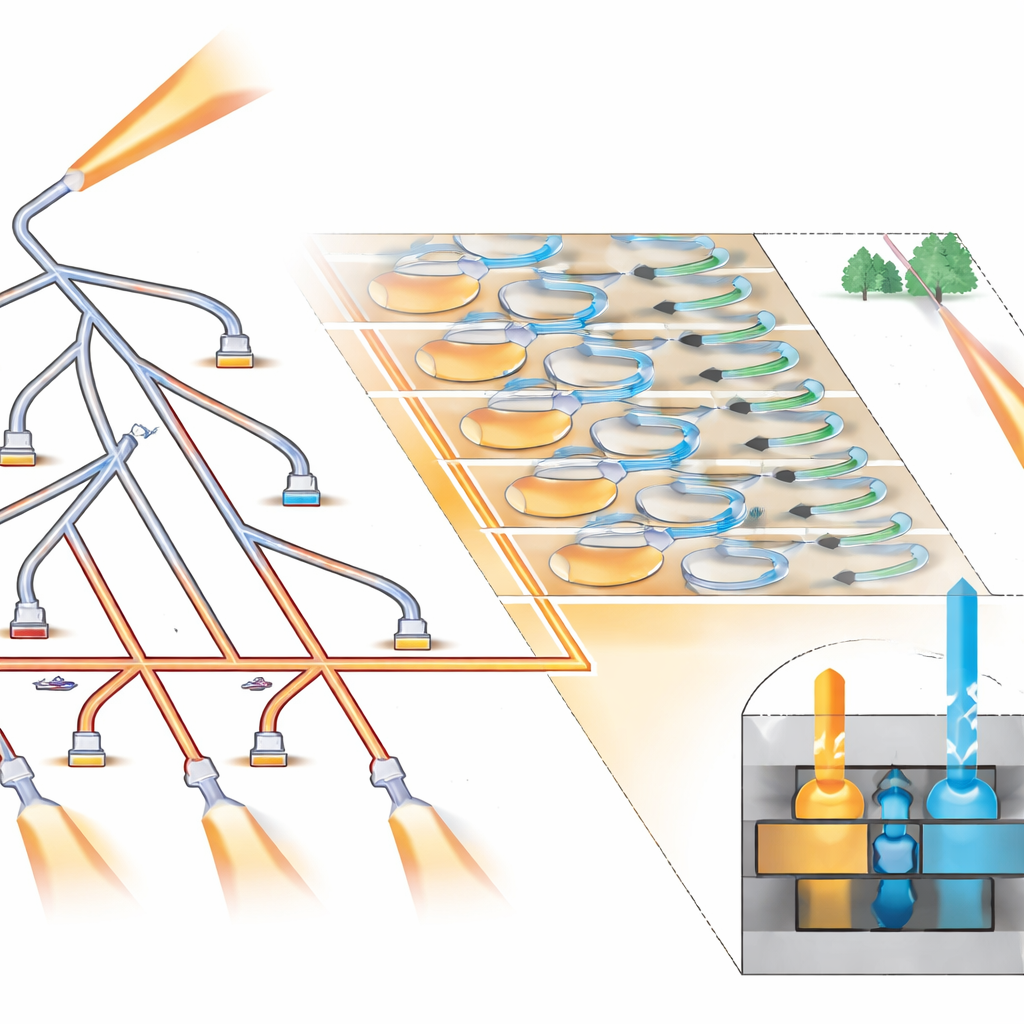
为覆盖大量像素而又不浪费能量,芯片通过微型光学开关树形分配啁啾激光光束,依次引导光到相邻的八像素组内。在每个像素组内,光被均匀分配,使八个像素同时既可作为发射器又可作为接收器。每个像素使用一对光栅耦合器用于发射和收集光,并配有一对平衡光电探测器和片上放大器,用以提取编码距离和速度的拍频信号。直接沉积在芯片上的特殊微透镜有助于更有效地进出光,提高效率。由于相同孔径既负责发射又负责接收(即“单站”设计),系统避免了像素间的杂散耦合,并且只需一个外部成像透镜,类似于常规相机。
将 4D 相机付诸测试
研究团队使用现成的短波红外透镜,将芯片封装成类似相机的模块,拍摄了室内与室外场景的详细三维点云。使用单个透镜时,传感器获得约 33×19 度的视场和最细 0.06 度的角分辨率——足以分辨办公室内的家具和数十米外建筑的结构细节。系统在 4 到 65 米范围内测量目标,单点光学能量仅为数十纳焦耳,像素平均照射功率约为每像素 178 微瓦,符合严格的眼部安全限制。它还能跟踪运动:在一项实验中,它以毫米/秒级精度测量了旋转盘的径向速度变化。
性能、限制与未来发展
精确测量表明,该传感器的性能已接近由光的量子性质设定的基本物理极限,但尚未完全达到。目前的主要限制来自每个像素放大器的电子噪声,这会使信噪比略低于理想的纯光子受限探测器。作者提出了若干简单的设计改进——主要是提高内部参考光强并优化光学布局,可能采用硅/氮化硅混合材料——可以将系统推向真正的光子计数噪声(shot-noise)受限状态,并将可用测距扩展到 200 米以上。将部分片上开关移出像素阵列还能消除远场覆盖中的小间隙,从而产生更干净的点云。
迈向日常化的 4D 视觉
这项工作展示了一种紧凑、完全集成的 4D 成像传感器,其像素数量和测距能力已可满足许多实际应用的需求,同时保持了可控的功耗与尺寸。通过将光发射器、接收器、波束控制与控制电子集成到单一硅芯片上,该器件在三维与运动感测领域扮演的角色类似于 CMOS 传感器对数码摄影的影响。经过进一步改进,此类传感器有望变得足够廉价且稳健,可嵌入汽车、机器人、手机与头戴设备,为机器提供精确的、实时的三维环境感知以及瞬时变化的动态信息。
引用: Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature 651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
关键词: 激光雷达, 4D 成像, 硅光子学, 自动化系统, 深度感知