Clear Sky Science · zh
用于智能机器人和交互系统的可扩展原位多模态电子皮肤制造
赋予机器人与玩具触觉
想象一个机器人能够轻柔地拿起一片烫面包而不压碎或烫伤你的手,或者一个玩具在你拥抱、弯折它的耳朵或用手掌加热时作出不同反应。这项研究描述了一种新型“电子皮肤”,通过赋予机器更丰富、更类似人类的触觉和近场感知,将这些想法更接近现实。
为什么机器需要更好的触觉
当今的机器人和设备在应对真实世界时仍显笨拙。许多设备只能感测单一类型的信号,例如压力,而且常依赖笨重、手工组装的部件,难以放大规模。然而,人类皮肤会同时融合多种信号:轻触、强压、拉伸、温度,乃至接触前对物体接近程度的感知。研究团队旨在构建一种电子版皮肤,能够同时捕捉多种这些感受,同时保持薄、柔韧并易于为不同任务定制。
构建薄且柔性的触觉系统
团队使用一种无需无尘室的制程,制成了低剖面的“电子皮肤”,该工艺可扩展且能快速适配。其核心是由紫外激光成型的柔性铜电路,它像印刷电路板中的布线,但可弯曲并包覆曲面。在该电路的上下两侧,加入了一层充满微小气孔的柔性硅胶,类似海绵。外层表面覆有薄碳纳米管膜,形成导电外壳,既能屏蔽电噪声,又作为传感的公共参考层。该结构使每个传感器单元表现为一个微型电容器,其电容值在受压、弯曲、加热或接近物体时发生变化。额外的小型芯片直接焊接在同一柔性电路上,用于测量温度和非接触距离,因此整张薄片不仅模拟了皮肤的压力与拉伸感受器,还具备温度感知和近距“视觉”。 
传感器如何感知压力与运动
电子皮肤中用于压力与弯曲的部分被设计为对微小变化有强烈响应且保持耐用。当有物体按压时,柔性层的气孔被压缩,使内部金属层相互靠近,并用更多硅胶取代空气。这两种效应都会提升电信号,尤其在低压区间材料最易被挤压时更明显。测试表明,该电子皮肤能检测到非常轻微的触碰,低至数十帕,并在一万次按压释放循环后仍保持快速响应和极小漂移。当薄片弯曲时,电路随之折叠,导致一侧层间间隙缩小,信号增强。随着弯曲角度变大,响应更为显著,这与现实中弯曲往往在局部集中的情况一致。总体上,该设计在软性、稳定性与灵敏度之间取得了平衡,避免了许多早期设备中使用的复杂叠层结构。 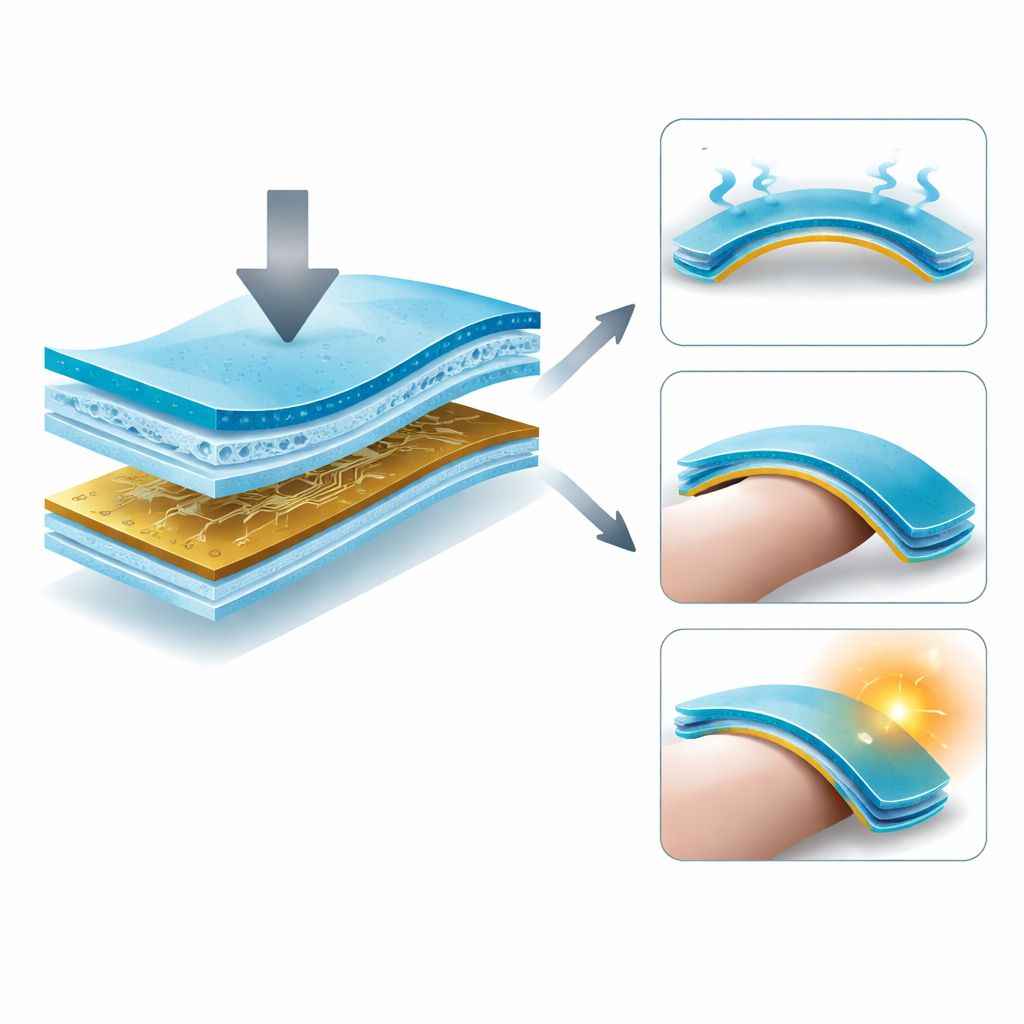
从厨房机器人到充满趣味的陪伴物
为展示电子皮肤的功能,研究人员将其包裹在机器人夹持器上,并赋予机器人一个烹饪类任务。当夹持器接近一片烫面包时,内嵌于皮肤中的微型深度传感模块首先测距,帮助机器人在接触前对齐手指。一旦接触,压力和弯曲传感器指导其施力强度,防止滑落或压碎面包。贴在同一薄片上的温度传感器则检测面包何时冷却到可以安全递给人的温度。另一个示例中,团队制作了一个覆盖电子皮肤的软象玩具:按压它的胸口会改变隐藏振动马达的节奏以模拟心跳,弯折耳朵会触发声音,手掌的温度能点亮玩具的面颊,将触摸转化为有趣且富有情感的互动。
在表面上看到压力分布模式
除了单点感测,相同的制造方法还能形成大型压力感测阵列,读取表面哪里以及以多大力度被触碰。团队演示了一个8×15的网格,像压力相机一样工作:当手指、砝码或压印形状按下时,系统能重建力场分布,甚至识别出字母等轮廓。这种捕捉压力图谱与重心位置的能力可帮助机器人平衡负载、识别物体,或用作智能称重平台与交互表面。由于底层工艺快速且模块化,设计者可为不同用途调整感测像素的大小、间距与软硬度,从智能家具到姿势监测垫均可适配。
对日常技术的意义
通过将多种感测模式——压力、弯曲、温度与近距——集成进单一、薄且易定制的薄片,这项工作使电子皮肤更接近人类皮肤的细微能力。尽管在极高压力下的性能还有提升空间,且某些组装步骤可进一步自动化,但该方法已表明可在无需沉重手工硬件的情况下,为机器人、玩具和其他设备添加丰富的触感。从实际角度看,这可能带来更安全处理易碎物品的家用机器人、更舒适记录身体接触的医疗可穿戴设备,以及以更自然方式响应我们触碰的交互产品。
引用: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
关键词: 电子皮肤, 触觉传感, 柔性传感器, 机器人夹持器, 交互设备